VirtualLab Fusion多(duō)元化光學仿真平台原理(lǐ)簡介
VirtualLab Fusion多(duō)元化光學仿真平台是德國LightTrans公司以場(chǎng)追迹概念開(kāi)發出來(lái)的一款多(duō)元化光學仿真平台,其集成了從幾何光學到物理(lǐ)光學、從近似到嚴格的各種麥克斯韋方程求解器(qì),如LPIA(局部平面界面近似)、LLGA(局部線性光栅近似)、RK-BPM(龍格庫塔光束傳輸方法)、TEA(薄元近似)、FMM/RCWA(傅裏葉模态法/嚴格耦合波法)等,能夠對如幾何透鏡、自由曲面、衍射透鏡、全息元件、GRIN透鏡以及光栅和(hé)Meta-Grating等各類元件進行(xíng)仿真和(hé)分析,以及如Geometric(幾何)、SPW(平面波譜)、Fresnel(菲涅爾)、Far Field(遠場(chǎng))、Rayleigh Sommerfeld(瑞利索墨菲)等,能夠對各種自由空(kōng)間(jiān)傳輸進行(xíng)計(jì)算(suàn)。同時(shí),VirtualLab Fusion還(hái)提供了三種傅裏變換方法,包括FFT(快速傅裏葉變換)、Semi-Analytical FT(半解析傅裏葉變換)以及Pointwise FT(逐點傅裏葉變換)。對于包含各類光學元件的整個(gè)複雜的光學系統,通(tōng)過非序列追迹功能,将所需的求解器(qì)連接起來(lái),并通(tōng)過選擇合适的傅裏葉變換方法,以在空(kōng)間(jiān)域或者空(kōng)間(jiān)頻率域進行(xíng)光場(chǎng)傳輸計(jì)算(suàn),從而能夠在保證計(jì)算(suàn)精度的情況下,更快的完成整個(gè)系統的仿真和(hé)分析,以實現多(duō)元化光學仿真。在整個(gè)仿真過程中,會(huì)考慮各種物理(lǐ)光學效應,如幹涉、衍射、像差、偏振、相幹以及矢量效應等。
多(duō)元化光學仿真平台的仿真原理(lǐ)
VirtualLab Fusion 多(duō)元化光學仿真平台的解決方案
VirtualLab Fusion的用戶受益于其在不斷增長的應用範圍內(nèi)的突破性技(jì)術(shù),包括但(dàn)不限于以下解決方案:
• 透鏡系統
• 激光系統和(hé)fs/as脈沖
• 光纖耦合
• 衍射光學
• 光栅& Metasurfaces
• 微透鏡陣列
• 擴散片和(hé)DOEs
• AR / VR / XR眼鏡
• 散射
• 幹涉
VirtualLab Fusion多(duō)元化光學仿真平台的靈活性建模
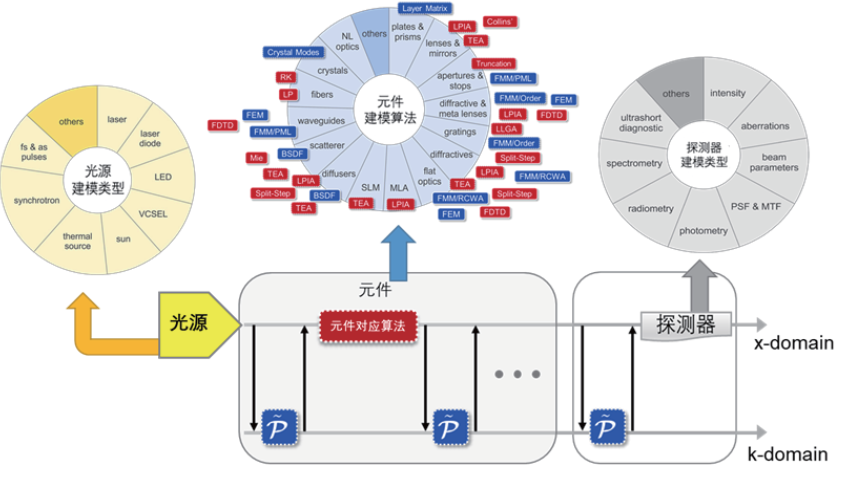
基于其獨創性的技(jì)術(shù),VirtualLab Fusion在光源、元件和(hé)探測器(qì)的建模方面具有(yǒu)無與倫比的靈活性。
• 光源的建模包括但(dàn)不限于激光,LEDs, LDs, VCSELs,熱光源,x射線源和(hé)超短(duǎn)脈沖。
• 元件的建模包括但(dàn)不限于折射透鏡、自由曲面、菲涅耳透鏡、Pancake 透鏡、GRIN透鏡、超透鏡、光栅、DOEs、晶體(tǐ)、光闌、棱鏡、纖維、光纖、擴散器(qì)、微透鏡陣列和(hé)SLMs。
• 探測器(qì)的建模包括但(dàn)不限于像差,PSF/MTF,光束參數(shù),輻照度,光度測定法,比色法和(hé)超短(duǎn)脈沖診斷。
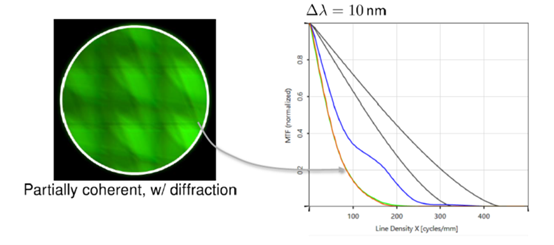
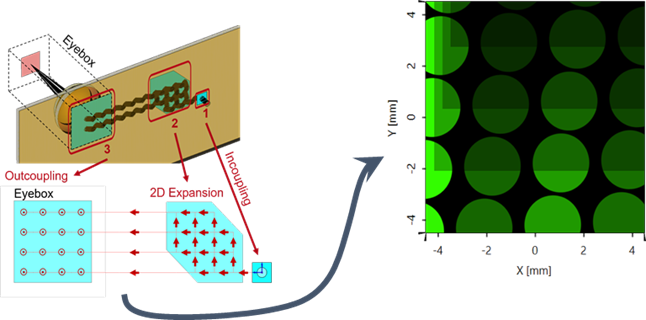
在波導AR模型的眼箱中模拟光瞳中的光分布以及由此産生(shēng)的MTF。仿真結果包括光源的時(shí)間(jiān)相幹性分析和(hé)波導內(nèi)部的衍射分析
VirtualLab Fusion多(duō)元化光學仿真平台的分布式計(jì)算(suàn)
多(duō)核仿真技(jì)術(shù)
VirtualLab Fusion具有(yǒu)許多(duō)交互性的仿真技(jì)術(shù)以及将這些(xiē)技(jì)術(shù)鏈接起來(lái)的平台。在技(jì)術(shù)選擇上(shàng),它提供了更準确以及更快速的模拟結果。通(tōng)過結合并行(xíng)化算(suàn)法與多(duō)核計(jì)算(suàn)機,可(kě)以進一步提高(gāo)仿真速度。在VirtualLab Fusion中,大(dà)多(duō)數(shù)仿真算(suàn)法支持并行(xíng)處理(lǐ),且能受益于多(duō)核計(jì)算(suàn)機。接下來(lái)将展示VirtualLab Fusion的多(duō)核計(jì)算(suàn)是如何顯著提高(gāo)仿真速度。
收集基本模拟任務
光學建模和(hé)設計(jì)任務通(tōng)常需要處理(lǐ)許多(duō)基本仿真任務。原因是多(duō)方面的,包括下面的例子:
多(duō)色光源和(hé)超短(duǎn)脈沖
由一組單色場(chǎng)表示,這些(xiē)單色場(chǎng)必須通(tōng)過系統傳播。每個(gè)單色場(chǎng)決定一個(gè)基本的仿真任務。
多(duō)模光源
發射多(duō)個(gè)橫向模式,例如,多(duō)模激光器(qì)或LED等擴展源,每一種模式都可(kě)看作(zuò)一個(gè)基本的仿真任務。
處理(lǐ)全視(shì)場(chǎng)(FOV)
例如,對于成像系統和(hé)AR眼鏡,結果是每個(gè)視(shì)場(chǎng)的基本仿真任務的疊加。
掃描系統參數(shù)
例如,移動探測器(qì)位置以分析焦點區(qū)域,每個(gè)參數(shù)得(de)配置都是一個(gè)基本的仿真任務。
公差
分析多(duō)種配置從而研究光學系統對參數(shù)變化的靈敏度。每個(gè)系統的配置可(kě)看作(zuò)一個(gè)基本的仿真任務。
優化
使用現代技(jì)術(shù)進行(xíng)優化,如進化算(suàn)法,每個(gè)優化步驟都需要許多(duō)基本的仿真任務。
如何實現高(gāo)速計(jì)算(suàn)?
在每個(gè)場(chǎng)景或場(chǎng)景的組合中,都有(yǒu)一組基本的仿真任務需要處理(lǐ)。分布式計(jì)算(suàn)允許對集合的模拟進行(xíng)并行(xíng)處理(lǐ),而不是一個(gè)接一個(gè)地執行(xíng)模拟。所實現的仿真速度與應用計(jì)算(suàn)機網絡的大(dà)小(xiǎo)成正比。
配置與VirtualLab Fusion進行(xíng)分布式計(jì)算(suàn)網絡設置的對話(huà)框
VirtualLab Fusion多(duō)元化光學仿真平台的應用領域
VirtualLab Fusion能夠實現多(duō)元化光學的建模和(hé)仿真,已廣泛的應用于高(gāo)校(xiào)、研究所以及各知名光學企業。其主要應用領域如下:
1. 光束整形
VirtualLab Fusion能夠使用自由曲面,衍射光束分束器(qì)與圖案生(shēng)成器(qì),擴散器(qì)和(hé)常規陣列微光學元件(包括但(dàn)不局限于微透鏡陣列)實現光束整形。
1) 折射光束整形
2) 衍射光束整形
3) 擴散片
4) 微透鏡陣列和(hé)微結構單元陣列
衍射光學光束分束器(qì)的設計(jì)
2. 光學測量系統
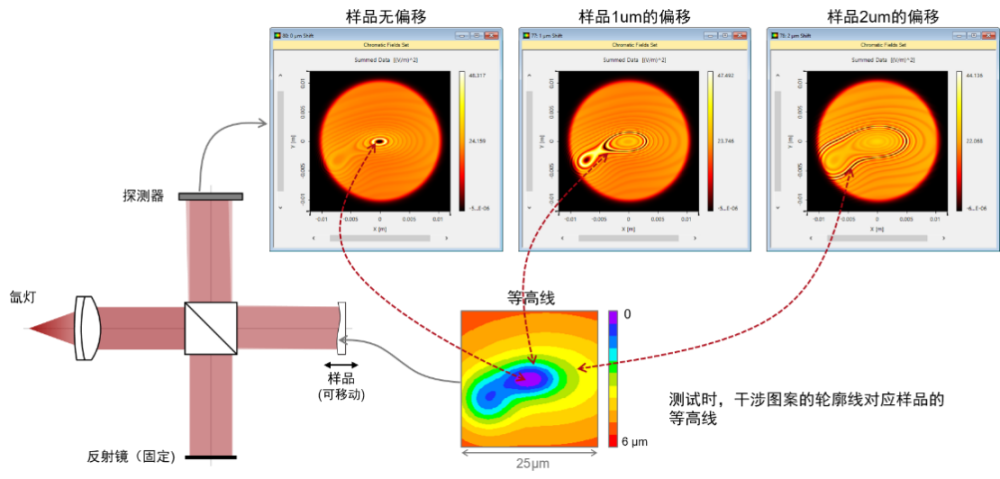
通(tōng)過高(gāo)速物理(lǐ)光學,對幹涉儀、光譜儀和(hé)傳統式或結構照明(míng)式顯微鏡的成像質量與分辨率限制(zhì)進行(xíng)全面的研究。
1) 幹涉儀
2) 顯微鏡
3) 單色儀
4) 光譜儀
幹涉系統光線追迹示意圖以及幹涉圖樣展示
3. 微納光子學
VirtualLab Fusion 中集成了傅裏葉模态法,可(kě)以對周期性的結構,例如任意結構的光栅進行(xíng)精确的模拟,獲得(de)相應的近場(chǎng)、衍射級次以及衍射效應。同時(shí)能夠對光栅進行(xíng)優化,以獲得(de)所需要光栅結構參數(shù)并集成到整個(gè)光學系統中進行(xíng)分析。也可(kě)以對非周期性的結構,例如微納小(xiǎo)顆粒進行(xíng)精确的模拟。
1) 1D和(hé)2D介質光栅
2) 1D和(hé)2D界面光栅
3) 衍射級次計(jì)算(suàn)、偏振分析以及內(nèi)部場(chǎng)計(jì)算(suàn)
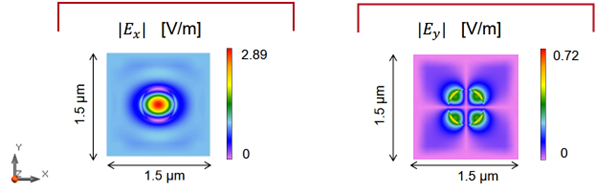
4) 納米圓柱
5) 優化
傾斜光栅的優化
平面波入射微納圓片時(shí),圓片後透射光場(chǎng)分布
4. 光學成像系統
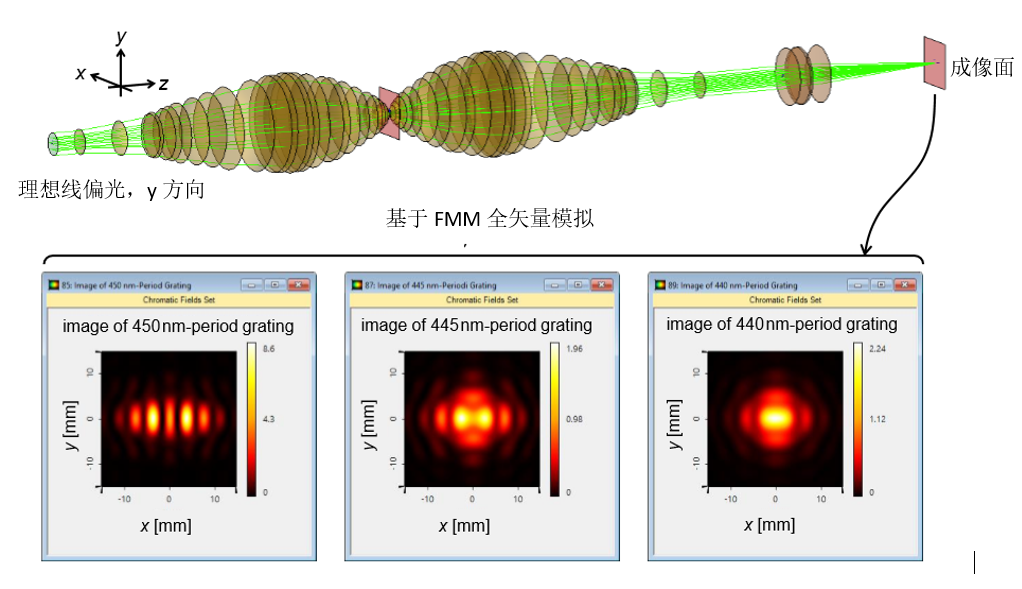
通(tōng)過高(gāo)速物理(lǐ)光學,實現透鏡系統建模。提供對包含鬼像和(hé)部分相幹性的系統的可(kě)靠的PSF / MTF評估。系統中可(kě)以包含光栅,全息光學元件以及衍射透鏡。
1) 衍射透鏡
2) 高(gāo)級PSF/MTF
3) 鬼像
4) 包含光栅的成像系統
基于高(gāo)NA物鏡對微結構晶圓進行(xíng)成像檢測
5. 激光物理(lǐ)/激光系統
高(gāo)速物理(lǐ)光學可(kě)以有(yǒu)效地實現對激光光源、衍射、幹涉、偏振的建模,并且可(kě)以使用任意感興趣的光束參數(shù)。
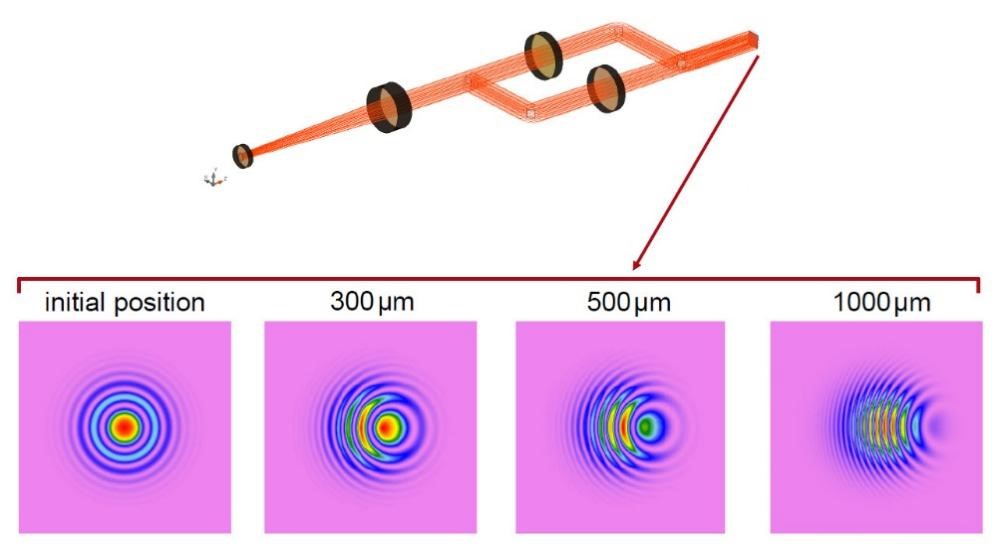
1) 激光傳輸
2) 掃描系統
3) 飛秒(miǎo)脈沖
4) 激光晶體(tǐ)
激光掃描系統的建模和(hé)仿真
6. 虛拟和(hé)混合現實
針對AR,VR以及MR應用,VirtualLab Fusion為(wèi)用戶提供了多(duō)通(tōng)道(dào)波導成像系統的非序列建模技(jì)術(shù),建模過程中能夠對波前差、能流以及PSF/MTF進行(xíng)評估。
具有(yǒu)“蝴蝶式出瞳擴展”的光導系統
7. 分布式計(jì)算(suàn)
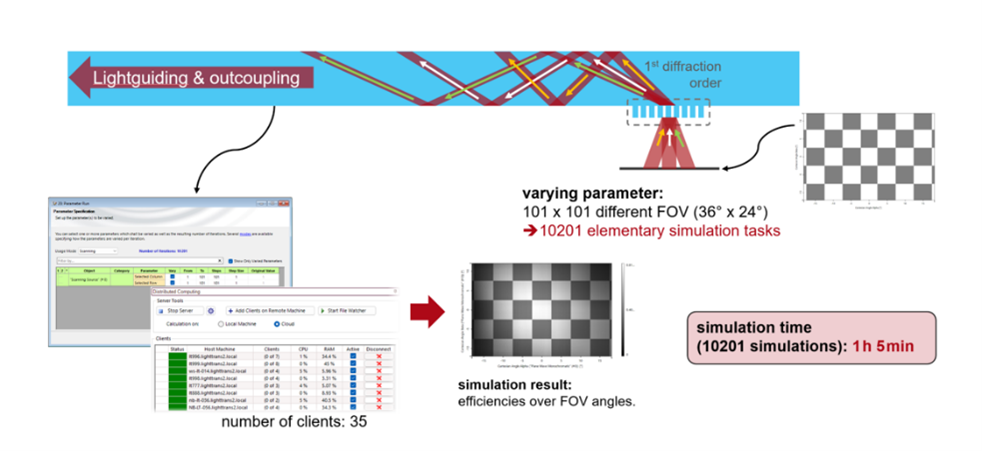
在沒有(yǒu)分布式計(jì)算(suàn)時(shí),生(shēng)成基本仿真任務是在參數(shù)運行(xíng)中完成的。在分布式計(jì)算(suàn)中,不需要更改工作(zuò)流程。可(kě)以通(tōng)過對話(huà)配置和(hé)控制(zhì)計(jì)算(suàn)機網絡實現這個(gè)功能。現如今,VirtualLab Fusion利用分配好的網絡處理(lǐ)基本的仿真任務。簡而言之:VirtualLab Fusion的用戶隻需多(duō)點擊幾下鼠标,就能享受到分布式計(jì)算(suàn)的強大(dà)功能。
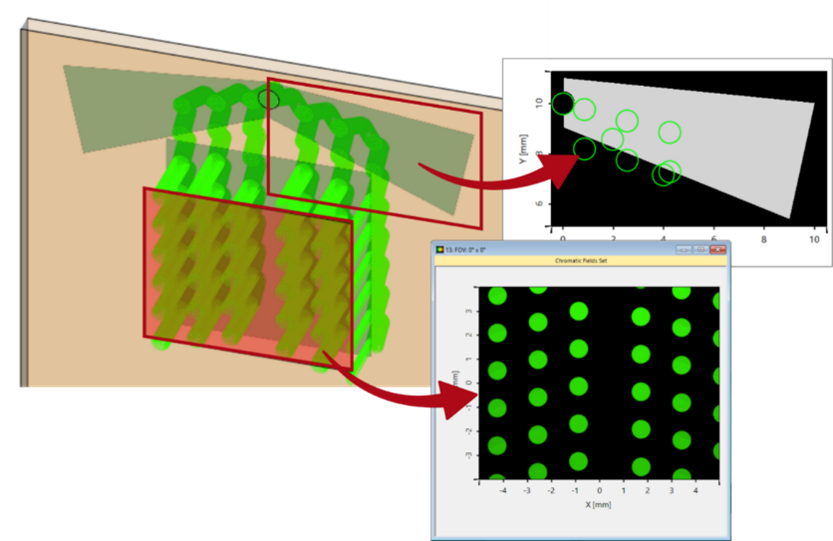
使用分布式計(jì)算(suàn)進行(xíng)AR光波導的測試成像仿真
VirtualLab Fusion多(duō)元化光學仿真平台部分典型應用示例
1. 基于各種幹涉儀的測量系統仿真和(hé)分析
2. 包含光栅的複雜光學系統仿真和(hé)分析
3. 光纖耦合系統的設計(jì)和(hé)優化
4. 基于表面光栅的光波導結構模拟與設計(jì)
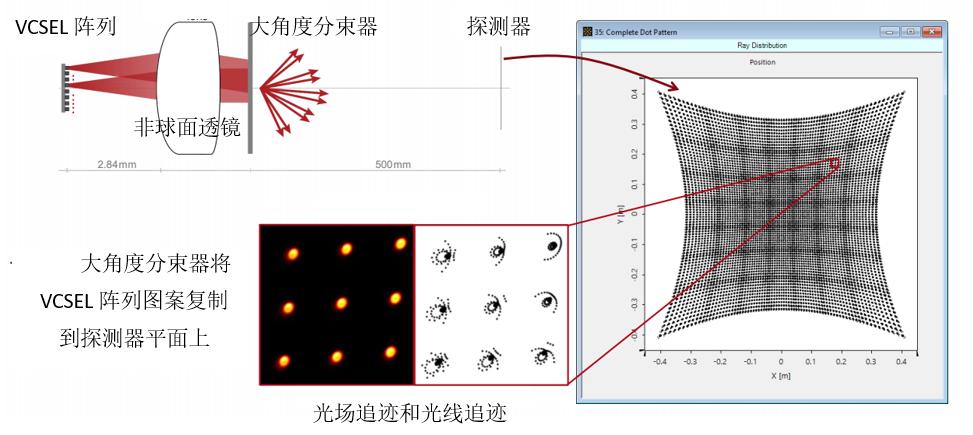
5. 基于VCSEL陣列的點陣投影(yǐng)儀的人(rén)臉識别系統
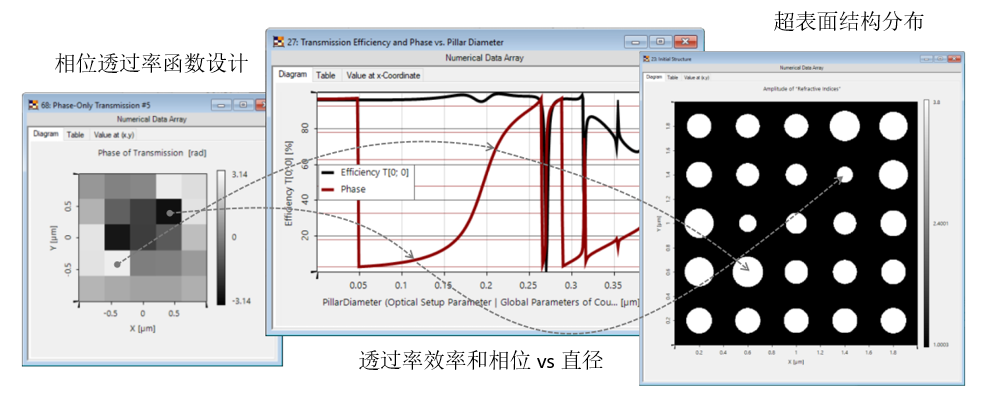
6. 超表面結構的設計(jì)和(hé)優化
7. 超透鏡設計(jì)和(hé)仿真
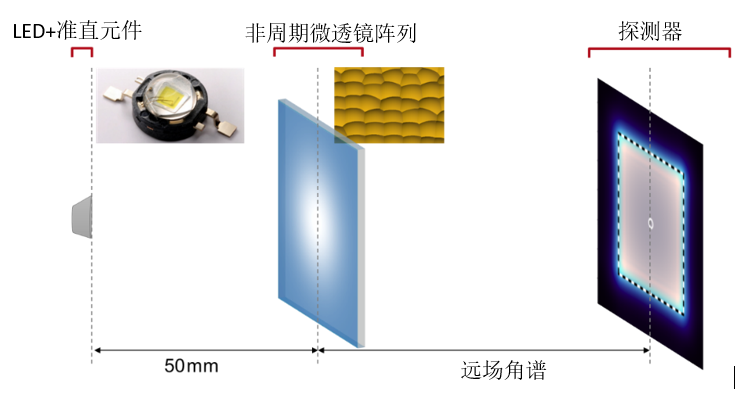
8. 非周期性微透鏡陣列整形
9. 衍射透鏡的設計(jì)和(hé)分析
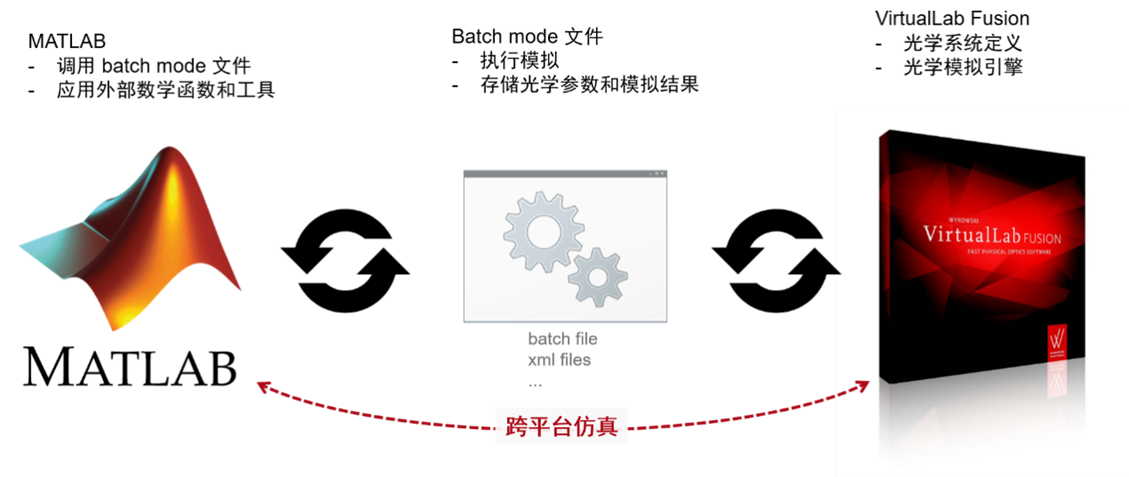
10. 跨平台聯合仿真與優化
計(jì)算(suàn)機配置
1. 操作(zuò)系統:Windows系統,Win10及以上(shàng)
2. CPU:推薦Intel I7及以上(shàng),主頻越高(gāo),計(jì)算(suàn)速度越快,支持多(duō)核計(jì)算(suàn)
3. 內(nèi)存:推薦32G及以上(shàng)
4. 接口:USB接口
5. 顯卡:适配顯卡
|










光電(diàn)的微信訂閱号!")