雙光楔式掃描系統是一種共軸式折射元件的掃描方式。它利用雙光楔的共軸相對轉動連續改變組合楔角大(dà)小(xiǎo),獲得(de)系統光軸連續擺動以實現系統掃描的一種掃描類型。該掃描方式由于利用折射的光楔元件,光楔楔角大(dà)小(xiǎo)受一定限制(zhì),因此掃描範圍不宜過大(dà)。利用雙光楔掃描可(kě)以實現一維線性掃描,兩維平面掃描以及兩位圓周掃描。再利用系統軸向調焦,還(hái)可(kě)以實現三維立體(tǐ)掃描。當然系統可(kě)以是物方掃描或是像方掃描均可(kě)。
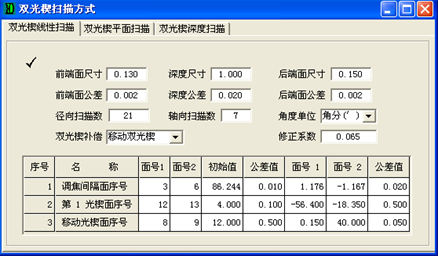
在設計(jì)時(shí),同樣在連續幾次選擇菜單後,在“系統基本數(shù)據”窗體(tǐ)內(nèi)選擇“雙光楔掃描方式”後會(huì)出現對應窗體(tǐ),在窗體(tǐ)上(shàng)選擇掃描方式如“像方深度掃描”後,窗體(tǐ)形式如圖1。接着再在 “設計(jì)”菜單點擊“雙光楔掃描系統設計(jì)”出現右圖,利用圖中滾動條即可(kě)進行(xíng)自動設計(jì)。
設計(jì)完成後可(kě)做(zuò)各種掃描仿真以及公差分析,幷給出公差分析曲線以确保設計(jì)的準确性。
圖1.雙光楔掃描型系統設計(jì)窗體(tǐ)
利用一對光楔(雙光楔)的繞光軸連續相對等速轉動可(kě)以改變光軸偏轉方向,OCAD可(kě)以實現雙光楔系統的連續掃描。他與反射鏡掃描不同就在于他的可(kě)連續性,而且其掃描中心軸與其入射光軸保持一緻,為(wèi)此可(kě)以在雙光楔轉動掃描的同時(shí),利用光學系統整體(tǐ)或局部繞光軸轉動實現系統圓錐式掃描。此外,在一個(gè)光學系統內(nèi)可(kě)以同時(shí)使用兩套雙光楔可(kě)以實現兩維平面掃描。
1.雙光楔一維線性掃描系統設計(jì)
利用一對雙光楔的相對轉動可(kě)以實現光學系統的一維掃描。在掃描過程中如果在像面上(shàng)的像面尺寸不變可(kě)以對應物方位置變化,形成在保持物方瞬時(shí)視(shì)場(chǎng)不變的前提下對物方目标進行(xíng)掃描。反之如果保持物方畫(huà)面不變,可(kě)以實現在像方進行(xíng)像面掃描。
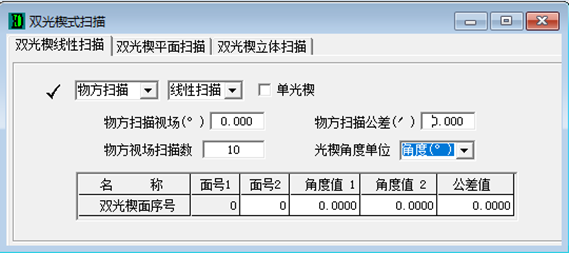
為(wèi)實現雙光楔一維線性掃描系統自動設計(jì),可(kě)以在主窗口界面環境下利用“編輯”中的“系統基本數(shù)據”菜單窗體(tǐ)內(nèi)選擇“掃描系統”的“雙光楔掃描方式”出現設計(jì)窗體(tǐ)如圖1。
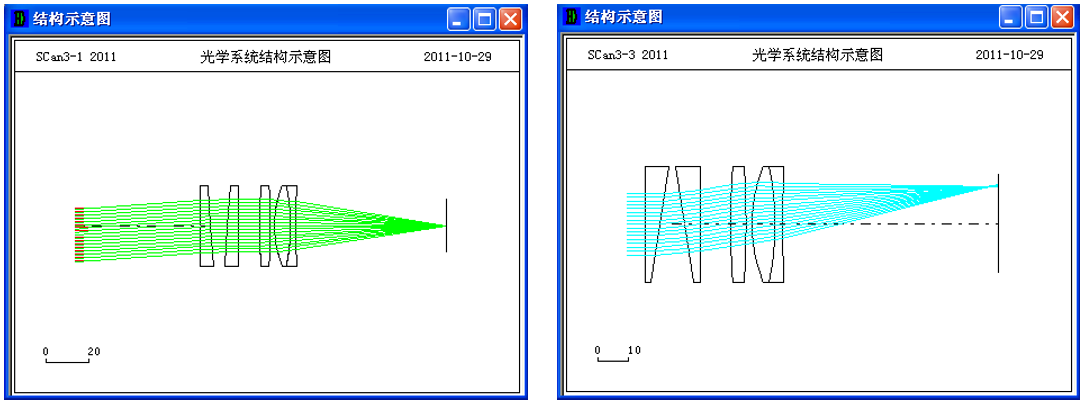
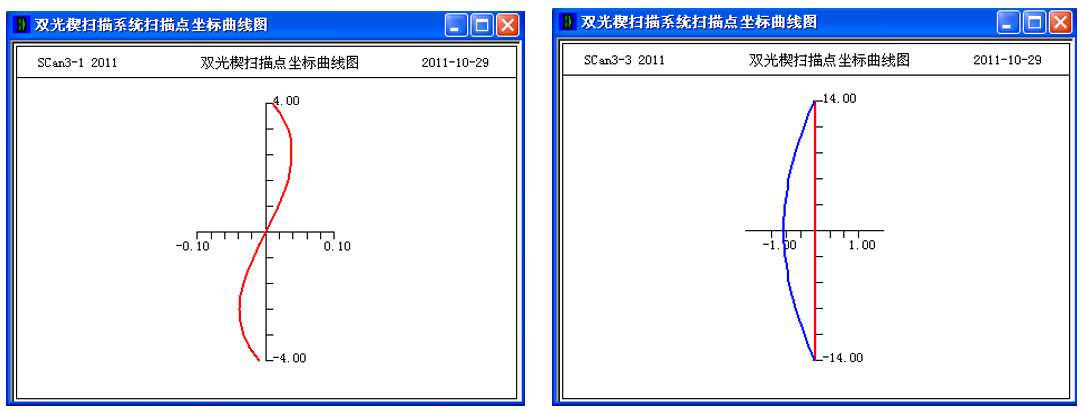
然後在此窗體(tǐ)內(nèi)選擇“物方掃描”或“像方掃描”,再選擇“線性掃描”。此時(shí)就可(kě)以在窗體(tǐ)內(nèi)填寫設計(jì)要求,比如物(像)方掃瞄視(shì)場(chǎng)(角度)、掃瞄視(shì)場(chǎng)(角度)公差要求、指定計(jì)算(suàn)掃描數(shù)以及指定光楔角度單位(角度或角分),再就是要指定雙光楔在系統內(nèi)所在面序号。由于雙光楔有(yǒu)兩個(gè)光楔,每個(gè)光楔隻有(yǒu)一個(gè)斜角面,因此在指定光楔面序号時(shí)要分别指定前後兩個(gè)斜角面的斜角面序号。當然還(hái)可(kě)以給出光楔斜角面的斜角角度參考值及角度公差值。以上(shàng)信息填寫完畢,點擊确定按鈕“√”程序會(huì)立即自動計(jì)算(suàn)出光楔的角度值完成設計(jì)。圖2就是這的設計(jì)滿足設計(jì)要求的系統結構示意圖。圖3為(wèi)雙光楔一維線性掃描系統像面誤差曲線圖供誤差分析參考。
圖2.雙光楔一維線性掃描系統結構示意圖
圖3.雙光楔一維線性掃描系統像面誤差曲線圖
2.雙光楔二維平面掃描系統設計(jì)
雙光楔二維平面掃描系統設計(jì)可(kě)以提供光學系統在子午和(hé)弧矢兩個(gè)方向的掃描效果。二維平面掃描就是對物方或像方進行(xíng)二維的平面掃描。二維平面掃描可(kě)以是以光軸為(wèi)圓心的圓形掃描,也可(kě)以是以光軸為(wèi)對稱軸的矩形(正方形)的平面掃描。由于雙光楔元件的運動是軸對稱的因此隻要在一維線性掃描的基礎上(shàng)雙光楔一起繞光軸轉動就可(kě)實現二維圓形掃描。其實二維圓形掃描就是一維線性掃描的的擴展,多(duō)加一個(gè)繞軸運動即可(kě)實現。
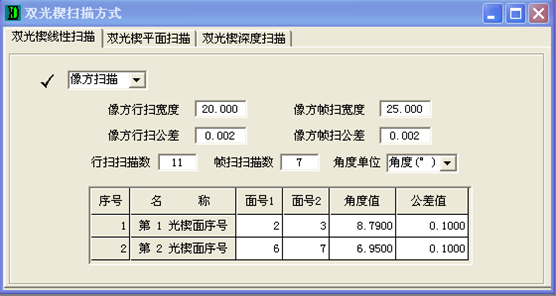
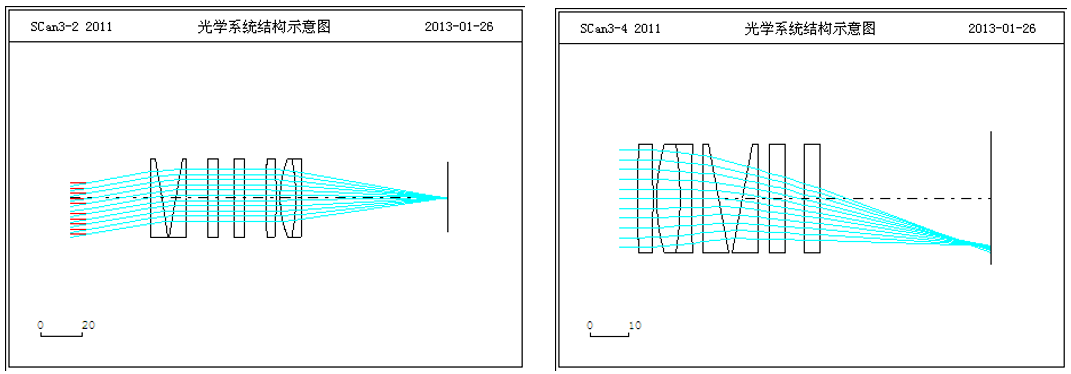
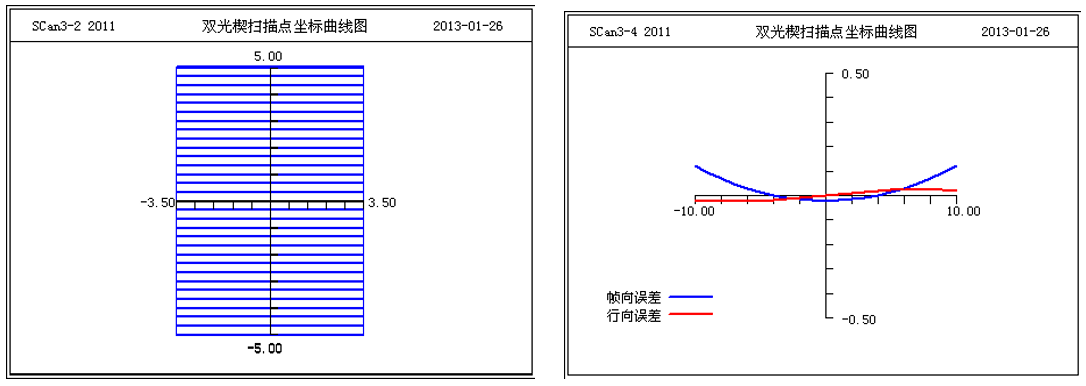
至于二維矩形掃描,也就是利用兩對雙光楔分别在子午和(hé)弧矢兩個(gè)方向上(shàng)做(zuò)線性掃描就可(kě)完成。在進行(xíng)自動設計(jì)時(shí),在圖4內(nèi)選擇“平面掃描”,窗體(tǐ)會(huì)顯示需要分别填寫子午方向掃描(幀掃)要求及弧矢方向掃描(行(xíng)掃)要求及兩個(gè)方向雙光楔的所在面序号即可(kě)。填寫具體(tǐ)含義同一維線性掃描內(nèi)容。數(shù)據信息填寫完畢,點擊“确定”按鈕,程序會(huì)立即計(jì)算(suàn)出兩組雙光楔的角度設計(jì)值如圖5。圖6分别顯示了雙光楔二維物方矩形掃描系統子午和(hé)弧矢兩個(gè)剖面結構示意圖,圖6顯示了系統物點掃描軌迹及像方掃描點誤差曲線。像方掃描點誤差相當于物方掃描畸變。
圖4.雙光楔二維平面掃描系統設計(jì)
圖5.雙光楔二維平面掃描系統結構示意圖
圖6.雙光楔二維平面掃描系統像面掃描及誤差示意圖
3.雙光楔三維立體(tǐ)深度掃描系統設計(jì)
雙光楔三維立體(tǐ)深度掃描系統顧名思義,就是指掃描系統不僅在某一固定像面上(shàng)掃描,還(hái)可(kě)以在像面縱深方向上(shàng)做(zuò)立體(tǐ)掃描。立體(tǐ)掃描一般多(duō)為(wèi)運行(xíng)掃描和(hé)深度掃描的結合,形成圓柱形(筒形)掃描。此種掃描可(kě)以用于各種深度探測或深度打孔方面的應用。根據在不同深度上(shàng)平面掃描的面積不同,可(kě)以實現筒形、錐形和(hé)倒錐形掃描。
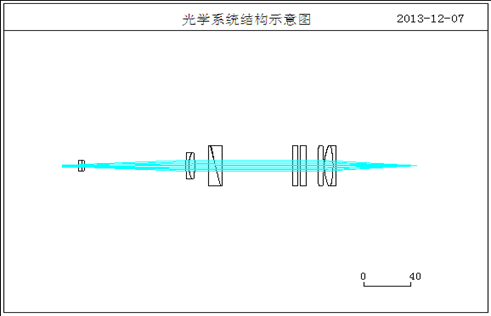
圖7.雙光楔三維立體(tǐ)深度掃描系統結構示意圖
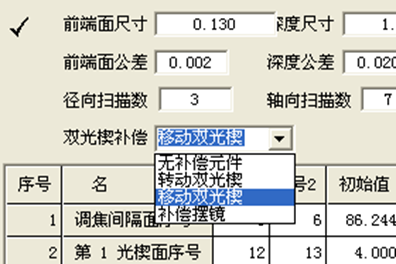
在掃描過程由于掃描前端面對掃描光線的遮擋,特别是對倒錐形激光打孔時(shí),必須注意對掃描光線岀瞳位置的控制(zhì)。為(wèi)此往往還(hái)需要使用一對補償光楔動态控制(zhì)光線岀瞳位置。補償方式有(yǒu)如圖8所列供選擇。
圖8.雙光楔三維立體(tǐ)深度掃描系統設計(jì)
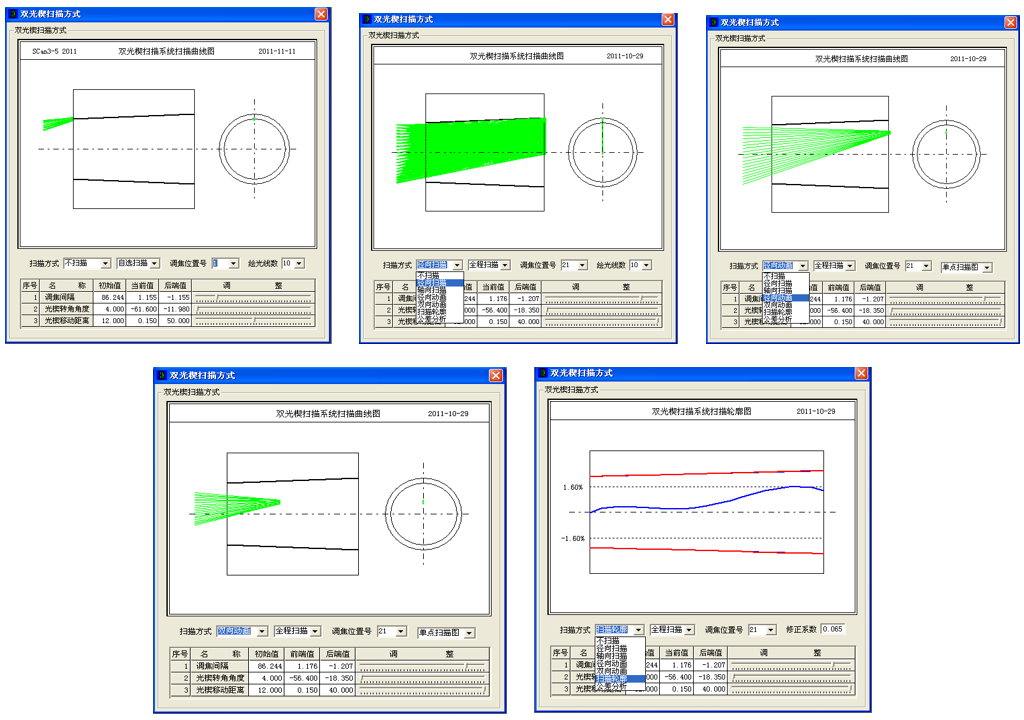
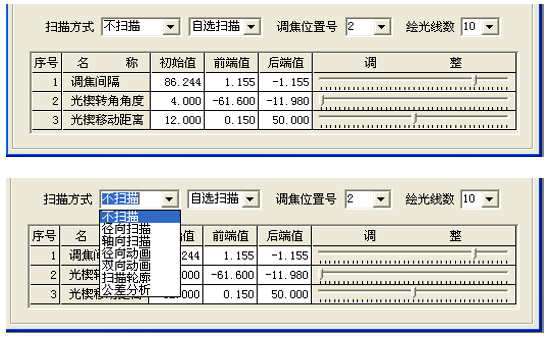
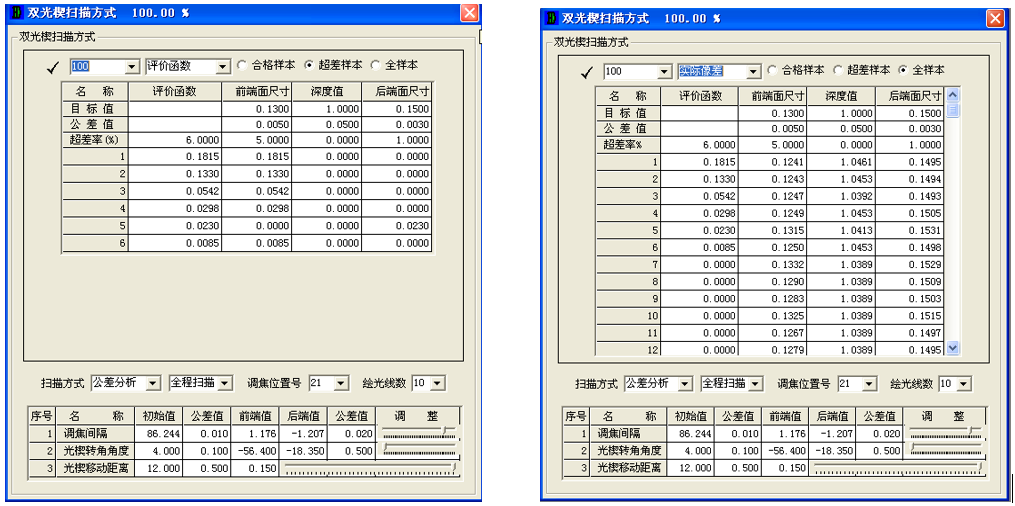
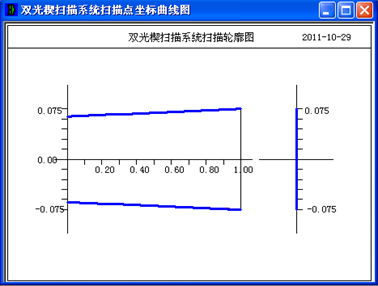
由于雙光楔三維立體(tǐ)深度掃描系統設計(jì)時(shí)變量因素較多(duō),而且各自影(yǐng)響又比較獨立,因此采用手工調節的方法比較直觀有(yǒu)效,設計(jì)時(shí)隻要在如圖8填寫完有(yǒu)關參數(shù)之後點擊“确定”按鈕即可(kě)出現一幅新的設計(jì)畫(huà)面如圖9。利用每行(xíng)數(shù)據右側滾動條即可(kě)随意修改相應參數(shù)幷在上(shàng)方圖形中及時(shí)動态觀察掃描光線變化情況以确定滿足要求的設計(jì)參數(shù)值。為(wèi)觀察設計(jì)效果,可(kě)以利用圖10下方所示 “掃描方式”下拉式菜單觀察設計(jì)中的各種信息,其中擴掃描光線的各種掃描效果、掃描輪廓圖形、圖形誤差以及掃描輪廓誤差及公差分析等,如圖9、圖10、圖11及圖12所示。
圖9.雙光楔三維立體(tǐ)深度掃描系統深度掃描示意圖
圖10.雙光楔三維立體(tǐ)深度掃描參數(shù)優化滾動條示意圖
圖11.雙光楔三維立體(tǐ)深度掃描系統公差合格率數(shù)據及曲線圖
圖12.雙光楔三維立體(tǐ)深度掃描系統像面軌迹示意圖
|
光電(diàn)的微信訂閱号!")