四組元連續變焦系統是在三組元連續變焦系統的基礎上(shàng)增加了一個(gè)變焦組分擔系統像面位移,由兩個(gè)變焦組一個(gè)補償組,再加一個(gè)前固定組和(hé)後固定組組成。兩個(gè)變焦組可(kě)以接連在一起,第二個(gè)變焦組固定不動,也可(kě)稱為(wèi)中固定組,雖然不動,也起着變焦組的功能。後面是補償組。系統前固定組、前變焦組、中固定組、補償組以及後固定組的光焦度正負相間(jiān)排列。此類變焦系統實際是一種四組元兩組移動的結構形式。由于四組元連續變焦系統有(yǒu)兩個(gè)變焦組,可(kě)以減輕補償組的負擔,減緩補償組凸輪曲線的陡度趨于平滑,可(kě)以進一步提高(gāo)系統變焦比。
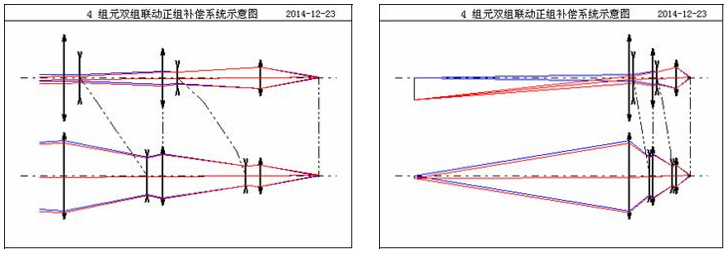
如果第二變焦組也可(kě)以沿軸向運動,補償組位于兩變焦組之間(jiān),是四組元三組移動形式的機械補償式連續變焦系統。該結構形式往往把兩個(gè)變焦組固聯在一起,稱為(wèi)四組分雙組聯動式變焦系統。
① 外形尺寸自動計(jì)算(suàn)
在選擇“設計(jì)”菜單中的“變焦系統高(gāo)斯計(jì)算(suàn)”後,會(huì)出現一個(gè)如圖1的小(xiǎo)窗體(tǐ)。窗體(tǐ)中央顯示了四組元二移動連續變焦系統的結構式意圖,下面表格給出系統的特征數(shù)據列表,左上(shàng)方有(yǒu)下拉式文本框選擇設計(jì)計(jì)算(suàn)以前固定組還(hái)是以後固定組為(wèi)基礎。根據前固定組求解是已知前固定組焦距值出發計(jì)算(suàn)系統外形尺寸數(shù)據,反之是從後固定組焦距值出發計(jì)算(suàn)系統外形尺寸數(shù)據。按表中內(nèi)容填寫完畢,四組元連續變焦系統的外形尺寸計(jì)算(suàn)工作(zuò)立即自動完成。此時(shí)如果選擇工具條上(shàng)“圖文”按鈕就會(huì)顯示系統外形尺寸計(jì)算(suàn)結構數(shù)據,如圖2。
圖1.變焦系統高(gāo)斯計(jì)算(suàn)窗體(tǐ)
圖2.外形尺寸計(jì)算(suàn)數(shù)據
對于四組元連續變焦系統,由于變焦組的分離,不存在換根以及物象交換原則的選擇。運動曲線隻有(yǒu)線性運動與非線性運動的選擇。
如果選擇工具條上(shàng)“動畫(huà)”按鈕還(hái)可(kě)以顯示系統變焦運動的動畫(huà)效果。如圖3。
圖3.變焦系統變焦運動動畫(huà)
② 初級像差系數(shù)自動平衡
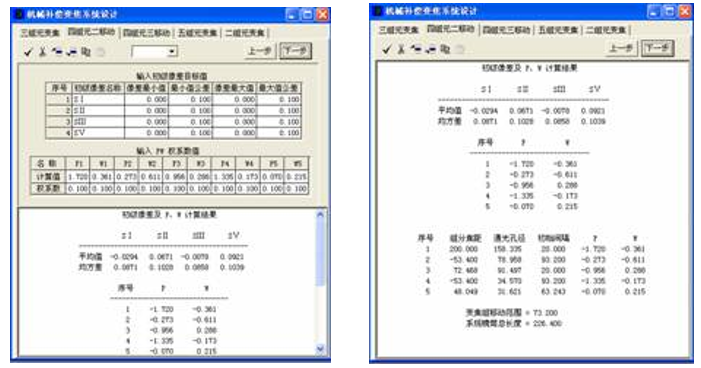
完成外形尺寸計(jì)算(suàn)後就可(kě)以接着進行(xíng)系統初級像差的平衡優化設計(jì)。此時(shí)按“下一步”命令鈕,窗體(tǐ)立即出現下一個(gè)畫(huà)面如圖4。其中列出兩個(gè)表格,一個(gè)是要求輸入各初級像差系數(shù)的目标值,另一個(gè)要求輸入系統各組元的PW參數(shù)的初始參考值及其權系數(shù)。
圖4.填寫初級像差系數(shù)
參加優化設計(jì)的初級像差項目可(kě)選,選擇時(shí)使用工具條上(shàng)插入和(hé)删除按鈕進行(xíng)操作(zuò)。以上(shàng)數(shù)據輸入完畢,按動工具條上(shàng)确定按鈕,計(jì)算(suàn)立即完成,并顯示在下面文本框內(nèi),如圖5。利用工具條上(shàng)“圖文”菜單随時(shí)可(kě)以單獨顯示PW自動優化結果,得(de)出系統實際像差平衡數(shù)據,最終完成四組元連續變焦系統的高(gāo)斯光學設計(jì)。
圖5.PW自動優化結果
③ 四組元系統的凸輪曲線
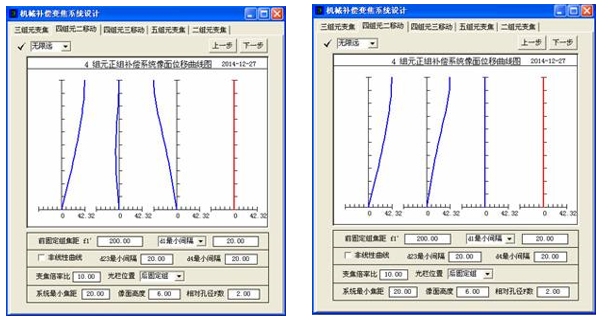
所謂機械補償式連續變焦光學系統就是利用兩個(gè)活動組分(俗稱變焦組和(hé)補償組)各自以不同函數(shù)的運動規律沿軸向移動改變光學系統各組分間(jiān)表面間(jiān)隔距離在改變系統焦距的同時(shí)保持像面位置穩定不變。在鏡頭機械結構時(shí)往往采用凸輪結構形式完成活動組分按要求運動。在設計(jì)凸輪機構時(shí)必須由光學設計(jì)給出凸輪運動曲線。凸輪曲線是在設計(jì)機械補償式連續變焦光學系統時(shí),為(wèi)保證系統像面位置穩定,用高(gāo)斯光學理(lǐ)論計(jì)算(suàn)變焦組和(hé)補償組的運動曲線。為(wèi)此,在本設計(jì)時(shí)就自動計(jì)算(suàn)出了系統凸輪曲線坐(zuò)标值并繪出凸輪曲線如圖6,通(tōng)過工具條上(shàng)“圖文”菜單随時(shí)可(kě)以顯示凸輪曲線的參數(shù)坐(zuò)标值如圖7所示。
圖6.變焦光學系統凸輪曲線圖
圖7.變焦光學系統凸輪曲線參數(shù)表
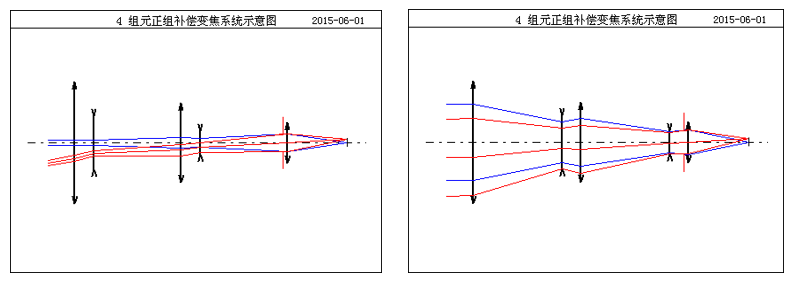
如果系統目标在有(yǒu)限距離內(nèi),可(kě)以在界面上(shàng)方下拉式文本框內(nèi)選擇“有(yǒu)限距離”,然後填寫目标距離,再按“确定”按鈕,就會(huì)顯示指定目标距離的光路示意圖。為(wèi)了更明(míng)顯顯示系統示意圖,再按右上(shàng)方“選擇按鈕”,會(huì)顯示示意圖如圖8右圖。
圖8.目标在有(yǒu)限距離系統光路結構示意圖
④ 各組元系統各組分對像面偏移及補償的關系
四組元連續變焦系統各組分對像面偏移及補償的關系如圖9所示。
圖9.各組分對象面偏移的貢獻示意圖
|





光電(diàn)的微信訂閱号!")