光纖陀螺儀系統設計(jì):DC檢測方法[1]
使用理(lǐ)想元件,輸出光電(diàn)流(I)為(wèi)
 (1)
其中 φs 是薩格納克相移 , Io 是以零角速度情況計(jì)算(suàn)出的電(diàn)流
 (2)
P 是光源光功率, σ 是光電(diàn)檢測器(qì)的響應度(在我們的案例中等于1)。在等式(2)中将光功率除以2是因為(wèi)在耦合器(qì)處功率損失了一半。 一旦 φs 确定了, 我們可(kě)以計(jì)算(suàn)
 (3)
其中 L 是光線長度, D 是環直徑, λ 是光源波長,由此來(lái)确定環路Ω 的角速度。注意,由于等式(1)具有(yǒu)餘弦,因此直流技(jì)術(shù)無法區(qū)分正負速度。
圖1.FOG DC檢測布局
光纖陀螺儀系統設計(jì):相位調制(zhì)方法[2]
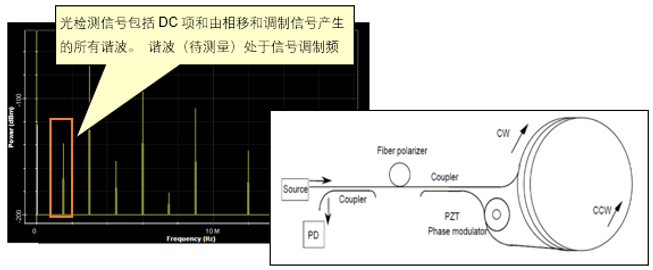
當嘗試測量非常低(dī)的角旋轉速率時(shí),DC方法不是很(hěn)準确,所以通(tōng)常使用相位調制(zhì)技(jì)術(shù)。 對于該設置,光檢測信号
 (4)
将相位調制(zhì)器(qì)幅度選擇到+/-0.9 rad ,給出最大(dà)化J1(Φm) = 0.581517 的項Φm = 1.8 。提取調制(zhì)頻率ωm的餘弦級數(shù)
 (5)
公式3得(de)到角速度。我們可(kě)以重新排列找到φ_𝑠,然後再次使用公式(3)找到角速度。 注意,在這種情況下,由于等式(5)具有(yǒu)正弦關系,所以我們可(kě)以确定角速度的大(dà)小(xiǎo)和(hé)方向。另外,在這種情況下, 在等式(2)中,零速電(diàn)流不是𝐼_𝑜=𝜎𝑃/2 而是 𝐼_𝑜=𝜎𝑃/8因為(wèi)在光到達光電(diàn)二極管的時(shí)候,其功率已經被耦合器(qì)減半了三次。
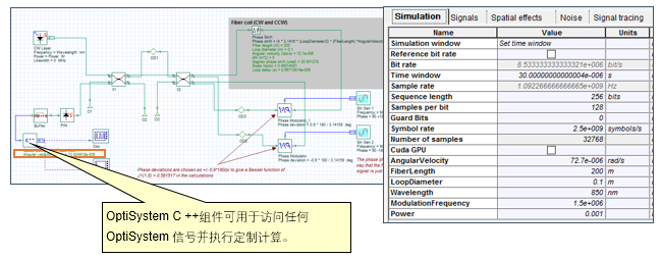
圖2.OptiSystem設計(jì)的調制(zhì)技(jì)術(shù)原理(lǐ)圖(資料來(lái)源:REF)(注:光纖偏振器(qì)未包含在設計(jì)中)
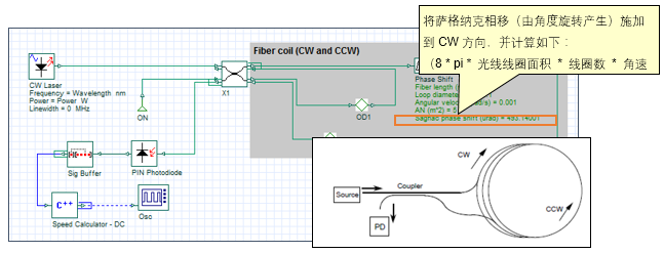
對于以下的OptiSystem設計(jì),角速度已設置為(wèi)7.27e-5rad / s(地球的轉速)。 I-FOG的設置顯示在紅色框中(在全局參數(shù)下)。 通(tōng)過使用相移分量來(lái)應用薩格納克相移,計(jì)算(suàn)如下:
在這裏,我們根據前面的方程,使用C ++組件來(lái)計(jì)算(suàn)角速度。 測得(de)的角速度(在C ++組件下顯示為(wèi)結果)為(wèi)7.29e-5rad / s。
圖3.FOG 相位調制(zhì)
static/file/Update_VirtualLab_Fusion_2020_2_1_116 (Accessed 24 Jan 2017).
|

光電(diàn)的微信訂閱号!")