在成像光學系統設計(jì)中,我們首先需要了解一些(xiē)最基本的基礎知識,即基本的像差理(lǐ)論。懂得(de)像差在光學系統中形成的原因,可(kě)以極大(dà)的幫助我們校(xiào)正産生(shēng)的這些(xiē)像差,達到很(hěn)好的成像質量。
常見的初級像差:五種單色像差和(hé)兩種色差。
五種單色像差分别為(wèi):球差,慧差,像散,場(chǎng)曲和(hé)畸變
兩種色差:球色差和(hé)倍率色差
下面我們來(lái)詳細分析球差産生(shēng)的原因:
球差概念
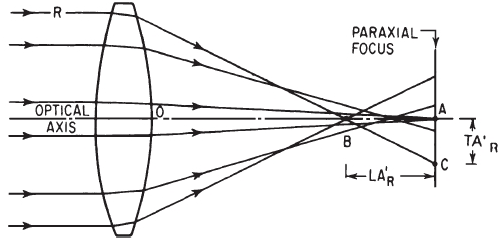
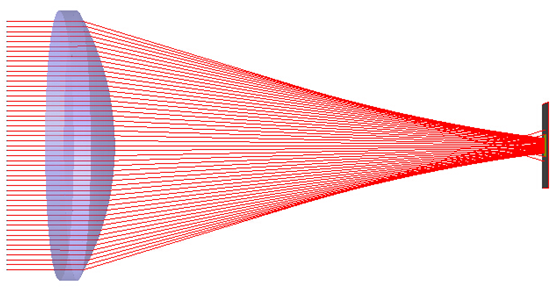
什麽是球差?其實球差也叫球面像差,是指軸上(shàng)物點發出的光束通(tōng)過球面透鏡時(shí),透鏡不同孔徑區(qū)域的光束最後彙聚在光軸的不同位置,在像面上(shàng)形成圓形彌散斑,這就是球差。
在FRED中如何表示呢?
FRED中球差的表述
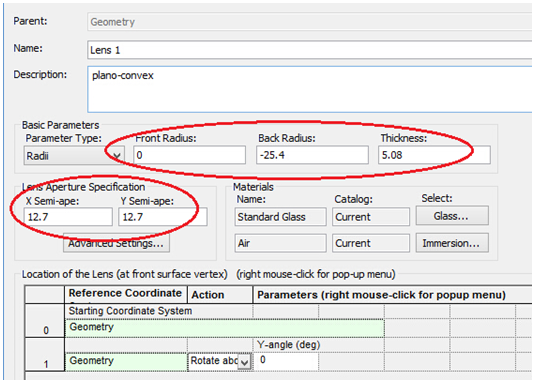
打開(kāi)FRED軟件,設計(jì)一個(gè)新的平凸透鏡R1=0,R2=-25.4 ;厚度5.08 ;半孔徑12.7材料為(wèi)标準玻璃。
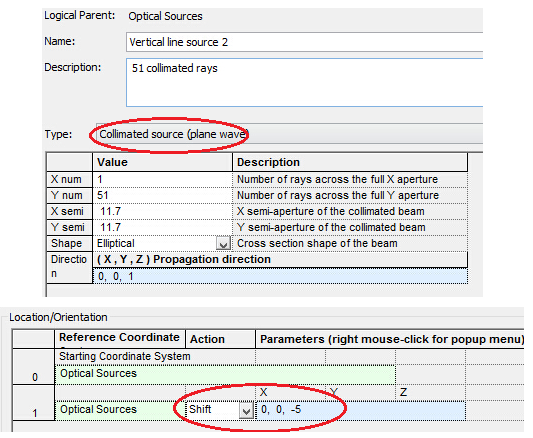
光源選擇為(wèi)垂直方向的線光源
X方向的光線數(shù)1;
Y方向的光線數(shù)51;
孔徑:11.7mm*11.7mm
Z軸負方向:5mm
尋找最佳焦點:
最佳幾何焦點的概念在FRED是RMS最小(xiǎo)值的位置,而近軸像平面的位置RMS并不是最小(xiǎo)值,對于近軸的位置我們可(kě)以使用減小(xiǎo)光源的半孔徑的大(dà)小(xiǎo),可(kě)選取半孔徑1mm*1mm。
1、 追迹光線
2、 點擊analyses/ Best geometric focus
3、 生(shēng)成報告
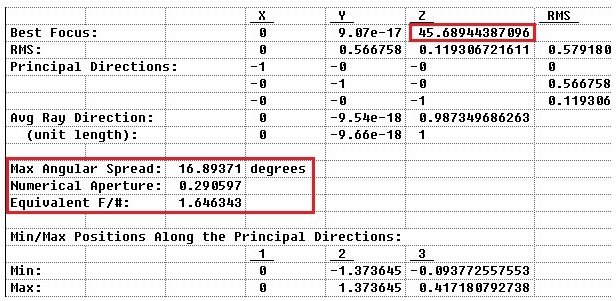
在Z方向最佳幾何焦點位置為(wèi)45.689443,
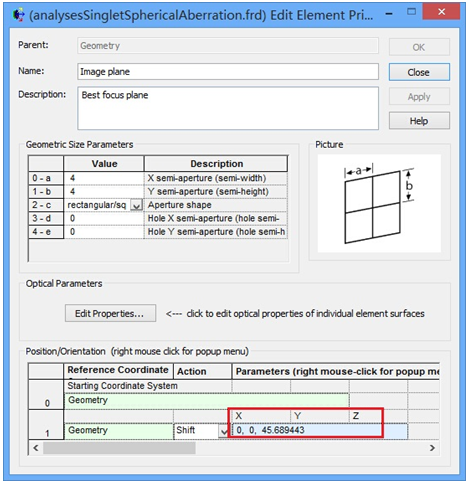
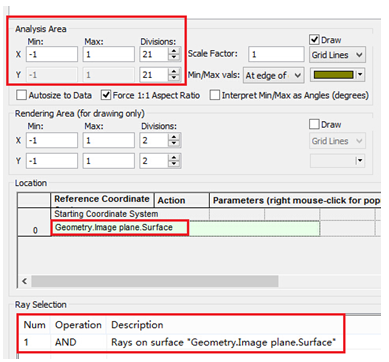
建立探測平面及分析面
注意此時(shí)的沿着Z方向的平移值即為(wèi)最佳幾何焦點位置值。
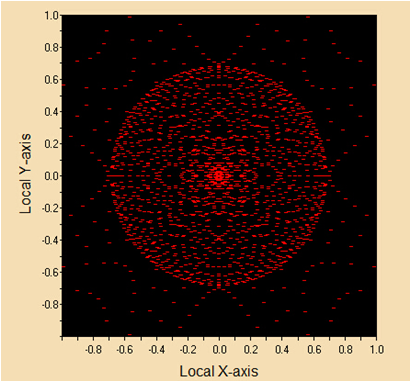
光線追迹(1*51,子午光線)
點列圖:(光線設置為(wèi)51*51)
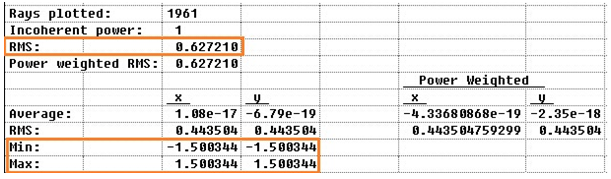
打開(kāi)輸出窗口,我們可(kě)以看到其RMS和(hé)幾何尺寸大(dà)小(xiǎo),
如果系統中隻存在球差,那(nà)麽我們可(kě)以估算(suàn)其球差大(dà)小(xiǎo)為(wèi)其最大(dà)點列圖最大(dà)尺寸,為(wèi)1.500344mm。
但(dàn)在實際的應用中,我們隻需要計(jì)算(suàn)其賽德爾系數(shù)SPHA。
如何查看三階像差賽德爾系數(shù)大(dà)小(xiǎo):
我們這裏利用近軸分析工具“paraxial analysis”,可(kě)以計(jì)算(suàn)系統的一階和(hé)三階系數(shù)。
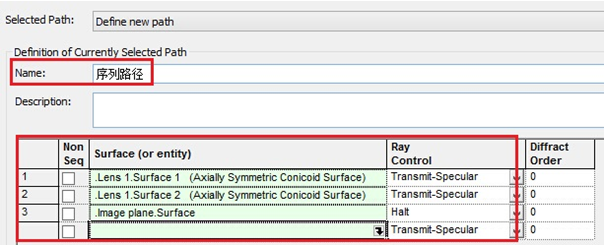
1. 首先我們自定義光線路徑Ray trace/user –defined ray paths,
光線按照序列追迹走向分别經過面1-面2-像平面
首先必須要給路徑命名,其次是注意元件序列追迹的順序以及光線通(tōng)過每一面的光線屬性控制(zhì),此例子中我們是允許光線在透鏡面透過,因此我們選擇鏡像透射,并在像平面處停止。
2. 創建完成後,我們點擊Analyses/ paraxial analysis
注意創建之前我們需要修改表面0的半孔徑值:0.0001改為(wèi)無限遠的物點
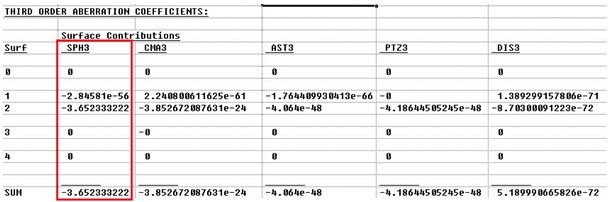
點擊Third Order,
第一列即為(wèi)三階球差貢獻量。
總結:
到此球差分析就結束了,FRED提供的分析工具最多(duō)可(kě)分析到三階像差,對于高(gāo)階球差的分析則需要自定義腳本,畢竟FRED不是專門(mén)透鏡設計(jì)軟件,它可(kě)以導入zemax等光學軟件設計(jì)好的結構。
|

光電(diàn)的微信訂閱号!")