摘要
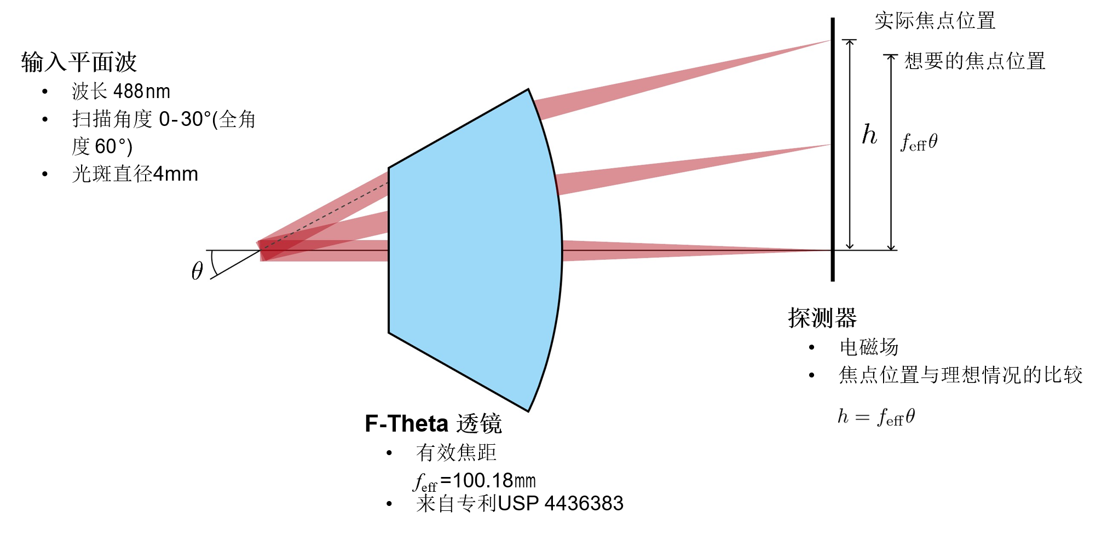
F-Theta 透鏡通(tōng)常用于Galvo類掃描儀的激光材料加工系統。 對于這樣的鏡頭,聚焦點沿目标平面的位移與鏡頭焦距和(hé)掃描角度的乘積成正比。然而,沒有(yǒu)完美的 F-Theta 系統,因此在任何給定的系統中都會(huì)出現與理(lǐ)想行(xíng)為(wèi)的偏差。 借助快速物理(lǐ)光學建模和(hé)設計(jì)軟件 VirtualLab Fusion 中的掃描源,我們通(tōng)過測量不同角度下實際光斑位置與期望值之間(jiān)的偏差來(lái)分析給定 F-Theta 透鏡的性能。
任務描述
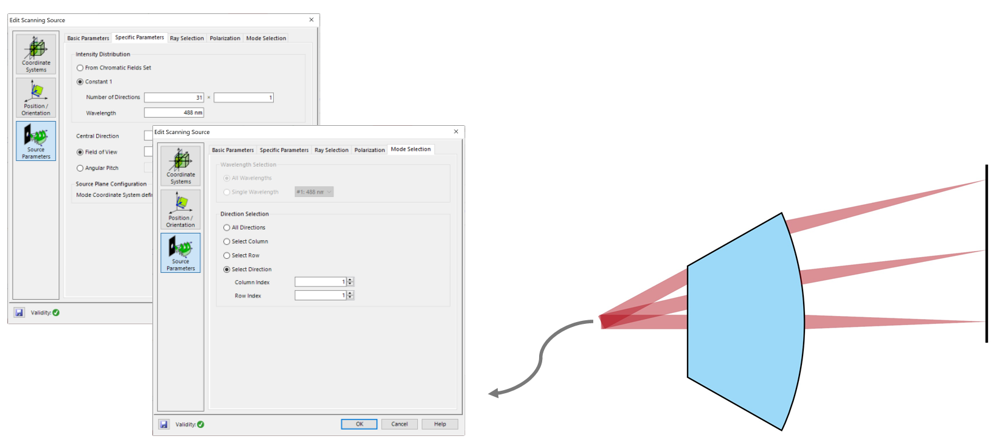
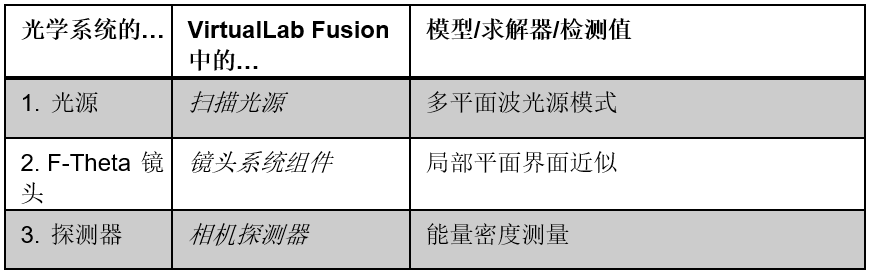
系統構建模塊 - 掃描光源
可(kě)以使用掃描光源定義生(shēng)成一組在不同方向傳播的截斷平面波的多(duō)模光源。
系統構建模塊 – 鏡頭系統組件
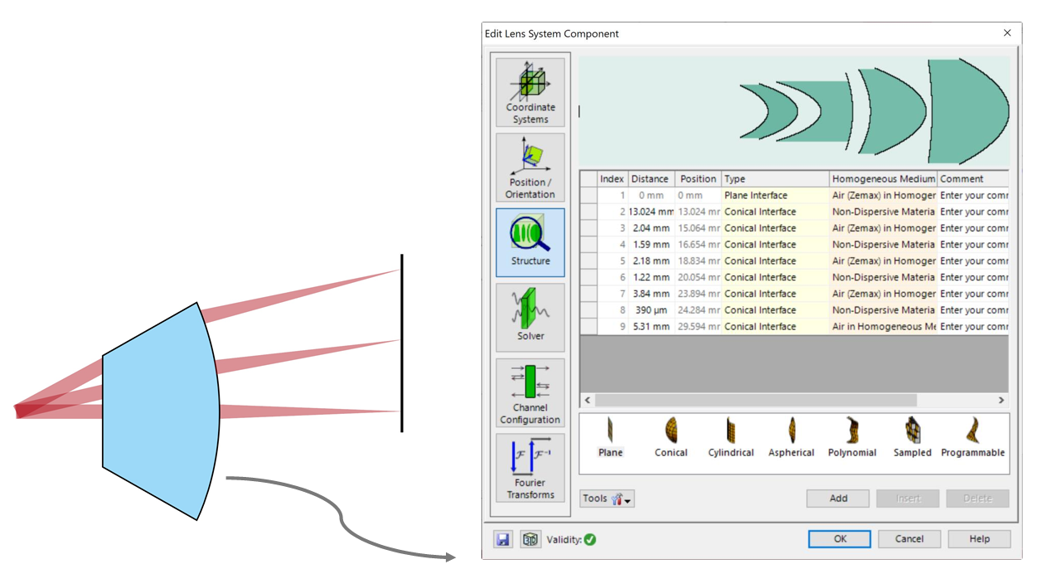
鏡頭系統組件允許輕松定義由各種界面組成的組件。 可(kě)以包括例如:平面、球形和(hé)圓柱形界面以及配置它們之間(jiān)的介質。
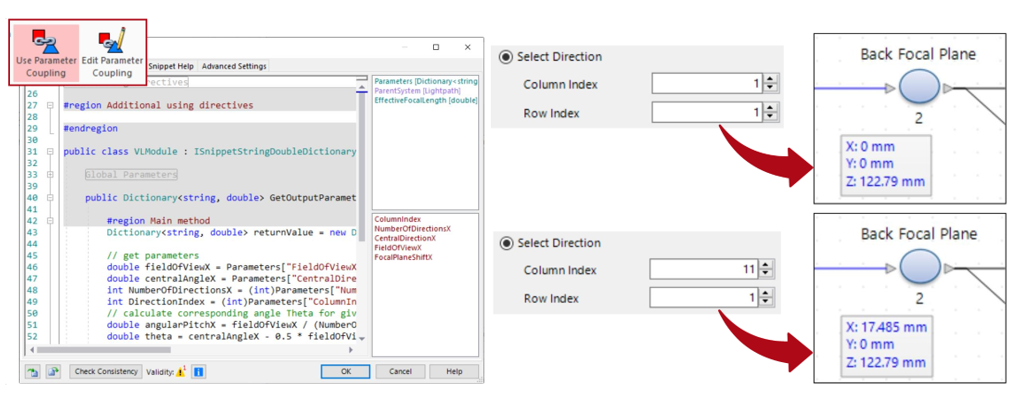
VirtualLab Fusion技(jì)術(shù)系統構建塊——參數(shù)耦合
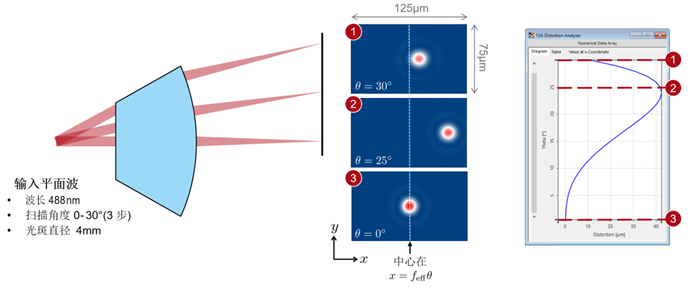
系統構建模塊——畸變分析器(qì)
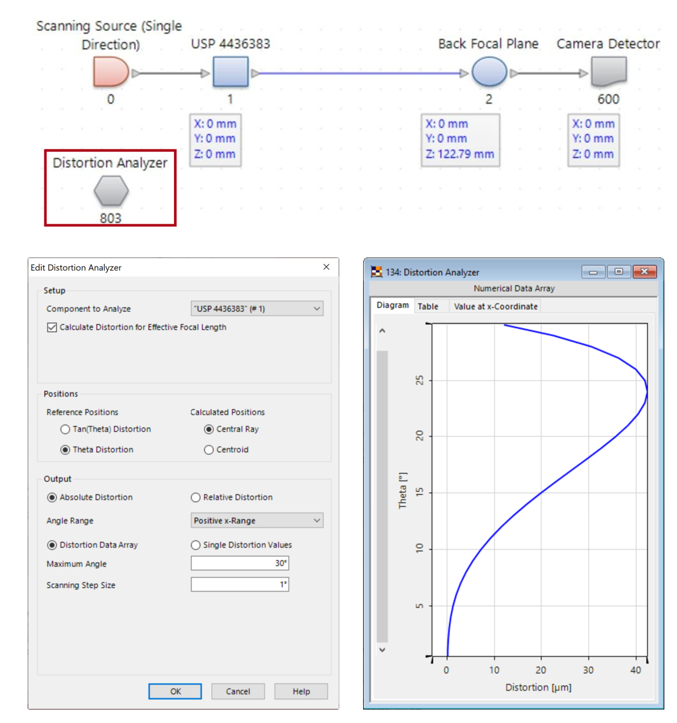
實際焦點位置與參考焦點位置之間(jiān)的偏差表明(míng)了 F-Theta 鏡頭的性能。 可(kě)以使用畸變分析器(qì)計(jì)算(suàn)此信息。
雖然實際焦點位置将通(tōng)過模拟計(jì)算(suàn),但(dàn)參考焦點位置可(kě)以指定為(wèi)角度本身的線性或其切線。
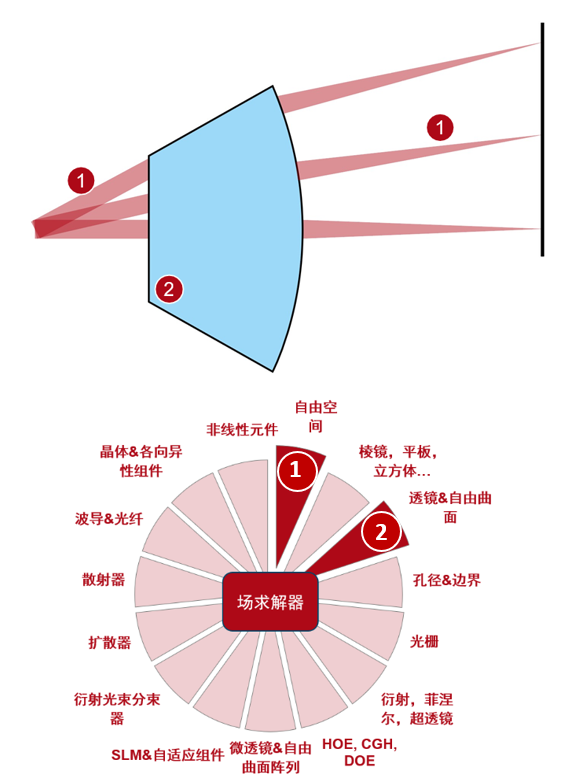
總結-組件…
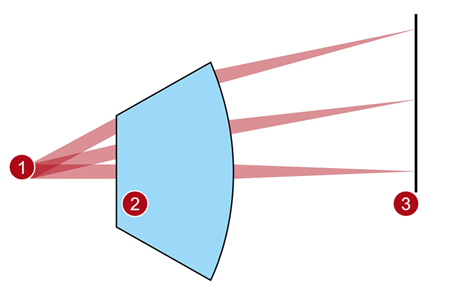
系統印象
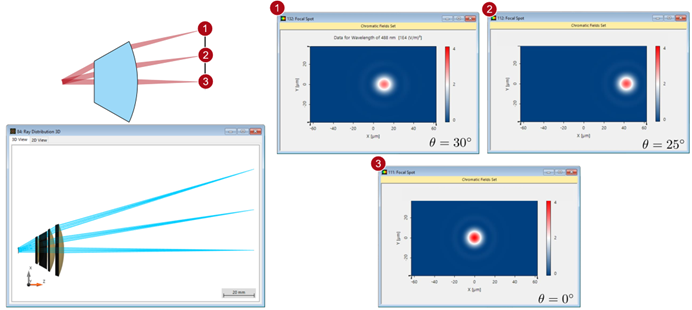
性能評估 – 光斑位置偏差
畸變分析器(qì)可(kě)以快速估計(jì) F-Theta 鏡頭的性能,可(kě)以通(tōng)過将場(chǎng)傳播到焦平面來(lái)進行(xíng)驗證。
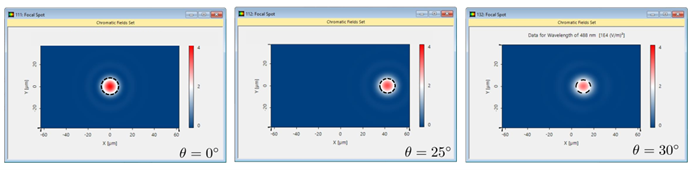
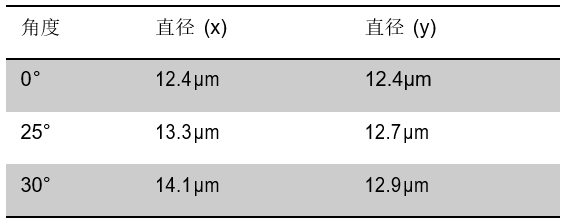
性能評估 - 光斑直徑測量
光斑直徑(FWHM)
此外,該結果可(kě)用于對 F-theta 系統産生(shēng)的斑點進行(xíng)更深入的分析。 例如,對光斑大(dà)小(xiǎo)的檢查表明(míng),對于更高(gāo)的輸入角度,單個(gè)焦點變得(de)越來(lái)越橢圓。
VirtualLab Fusion技(jì)術(shù)
文件信息
更多(duō)閱覽
- Performance Analysis of Laser Scanning System
- How to Set Up a Scanning Source
- Coupling of Parameters in VirtualLab Fusion
|
光電(diàn)的微信訂閱号!")