摘要
鏡頭是成像系統設計(jì)的一個(gè)組成部分。因此,對任何光學工程師(shī)來(lái)說,能夠詳細分析它們的性能是至關重要的。一個(gè)衆所周知的不利影(yǐng)響是畸變,它導緻光束的橫向位置相對于焦平面的參考位置的偏差。在這個(gè)使用案例中,我們介紹了一個(gè)工具,以球面透鏡為(wèi)例,研究這種效應。
畸變定義
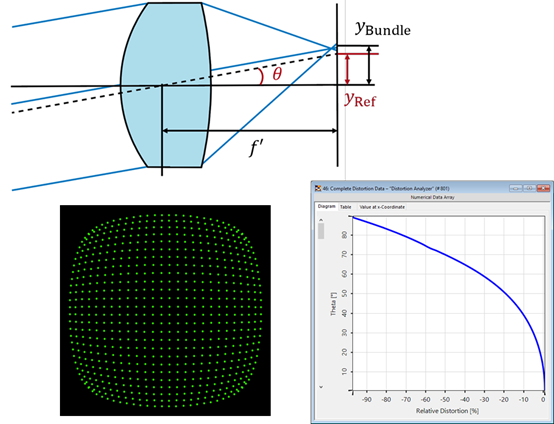
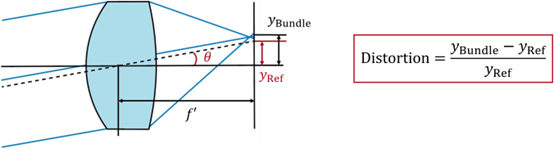
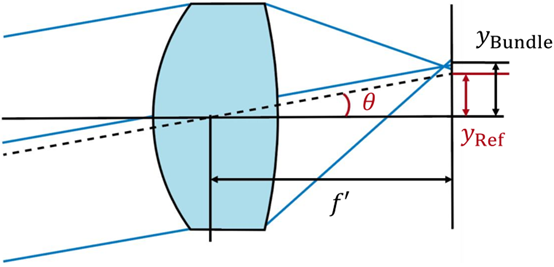
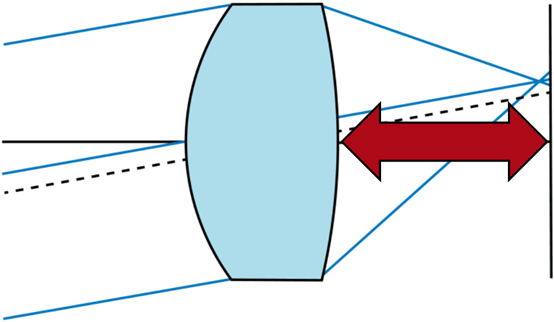
畸變與主光線的球面像差相對應。它被定義為(wèi)光線束的橫向位置相對于焦平面的參考位置的偏差。使用掃描鏡頭的有(yǒu)效焦距(𝑓'),可(kě)以計(jì)算(suàn)出焦平面的參考位置,這主要取決于入射角。
f’:有(yǒu)效焦距。
θ:入射角度。
yBundle:光線束的側向位置
yRef:參考光線的側向位置
畸變定義
F-tan(theta)畸變:yRef=f’tan(θ)
F-theta畸變:yRef=f’θ
光線束的位置(𝑦Bundle)。
- Central ray:連接視(shì)野的外點和(hé)瞳孔的中心
- Centroid:與物理(lǐ)相關的是能量中心點
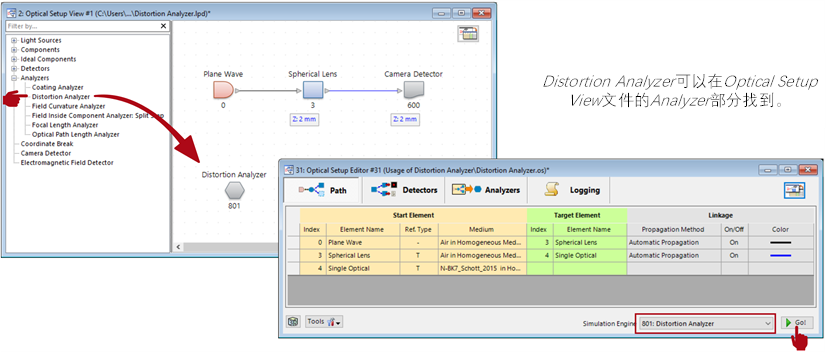
哪裏可(kě)以找到畸變分析器(qì)
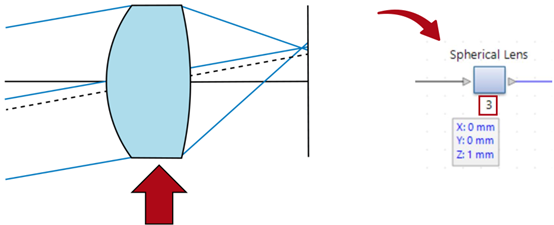
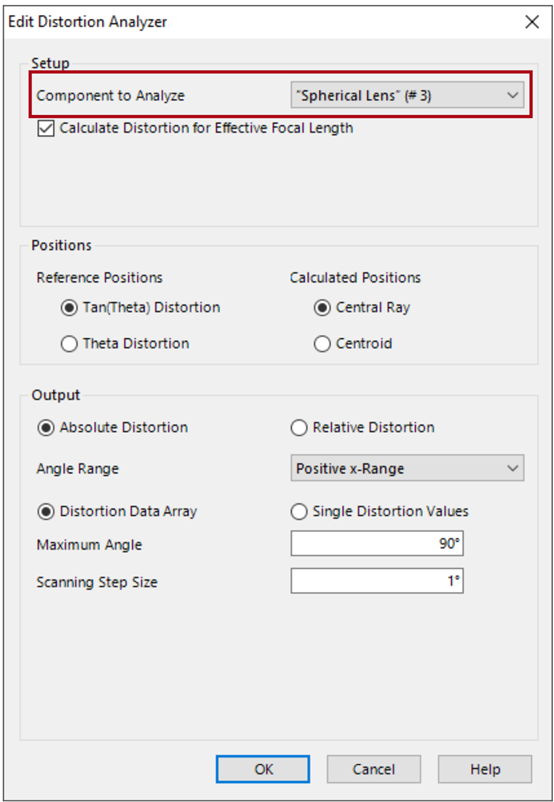
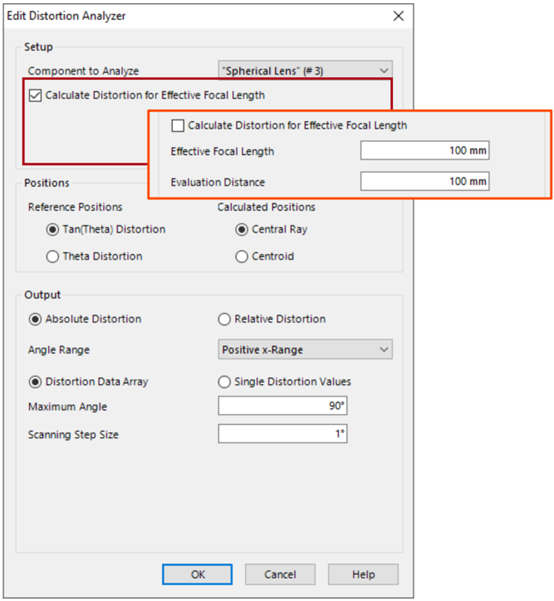
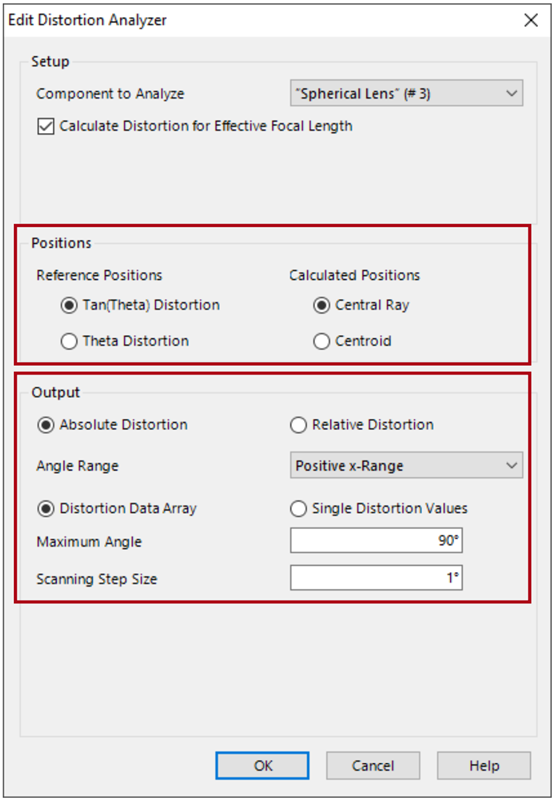
要分析的組件
畸變分析器(qì)計(jì)算(suàn)由透鏡或物鏡在定義的角度範圍內(nèi)引入的光束的畸變。它的工作(zuò)獨立于實際的光學系統及其參數(shù),因此,具體(tǐ)的參數(shù)需要在分析器(qì)內(nèi)定義。
要分析的組件:定義應分析的組件。一個(gè)下拉菜單将顯示所有(yǒu)可(kě)用的選項。如果有(yǒu)多(duō)個(gè)具有(yǒu)相同名稱的組件,組件下面的索引将有(yǒu)助于區(qū)分它們。
位置(畸變類型,見第4頁)
- 參考位置
- 計(jì)算(suàn)的光線束位置
輸出(結果顯示)
- 絕對畸變[m]或相對畸變[%]
- 角度範圍:定義沿着哪個(gè)方向掃描畸變(組件的X軸或Y軸,在這兩種情況下都可(kě)以使用正或負的範圍)。
- 畸變數(shù)據陣列:你(nǐ)可(kě)以掃描一個(gè)完整的角度範圍,結果以數(shù)據陣列的形式返回--如果系統的光源發出一個(gè)以上(shàng)的波長,則以數(shù)據陣列集的形式返回。
- 單一畸變值:在這種情況下,可(kě)以直接配置相關的角度。這種模式可(kě)以用參數(shù)優化來(lái)優化某些(xiē)角度的畸變。
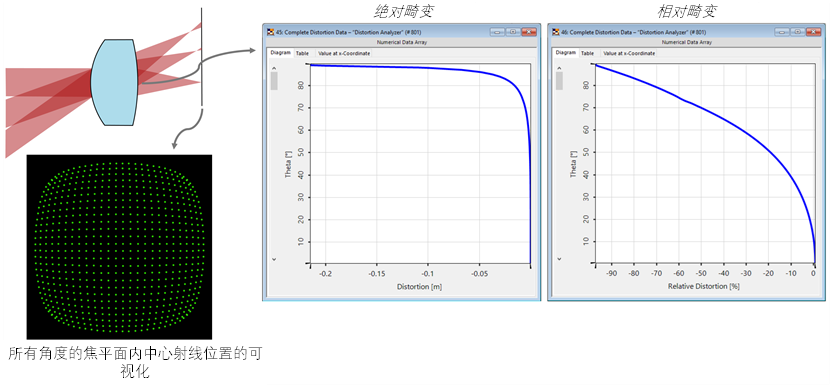
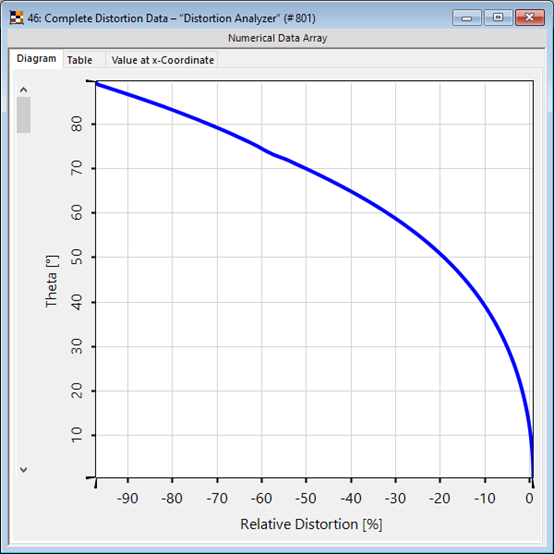
例子:球狀透鏡的畸變
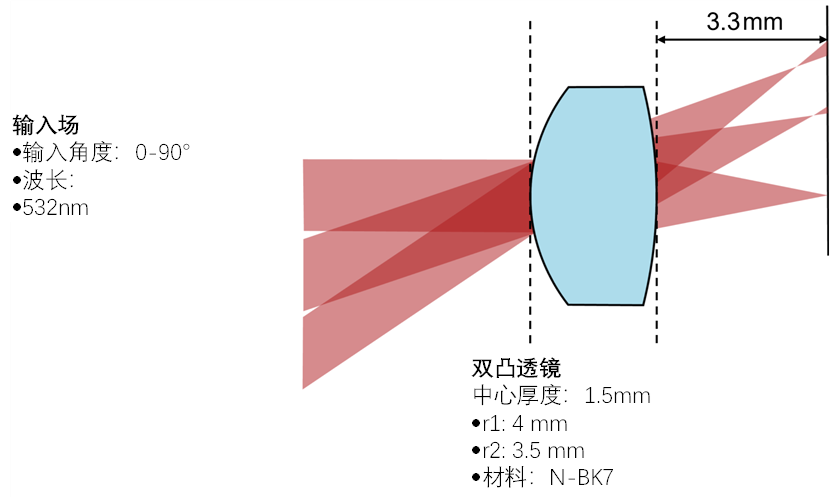
例子:球狀透鏡的畸變
VirtualLab Fusion技(jì)術(shù)
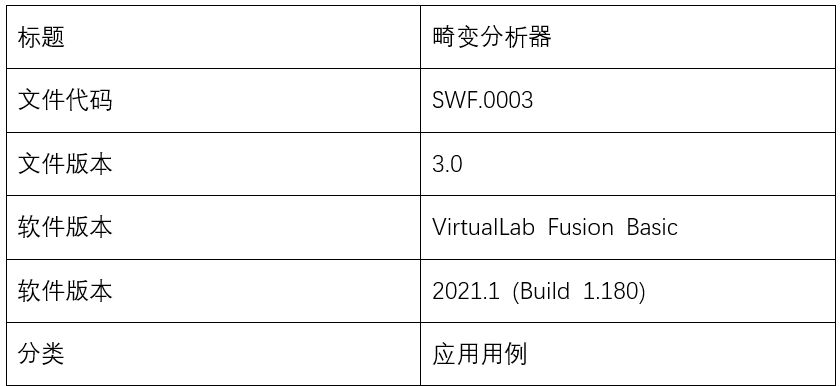
文件信息
更多(duō)閱讀
- Evaluation of an F-Theta Scanning Lens
- Field Curvature Analyzer
|
光電(diàn)的微信訂閱号!")