摘要
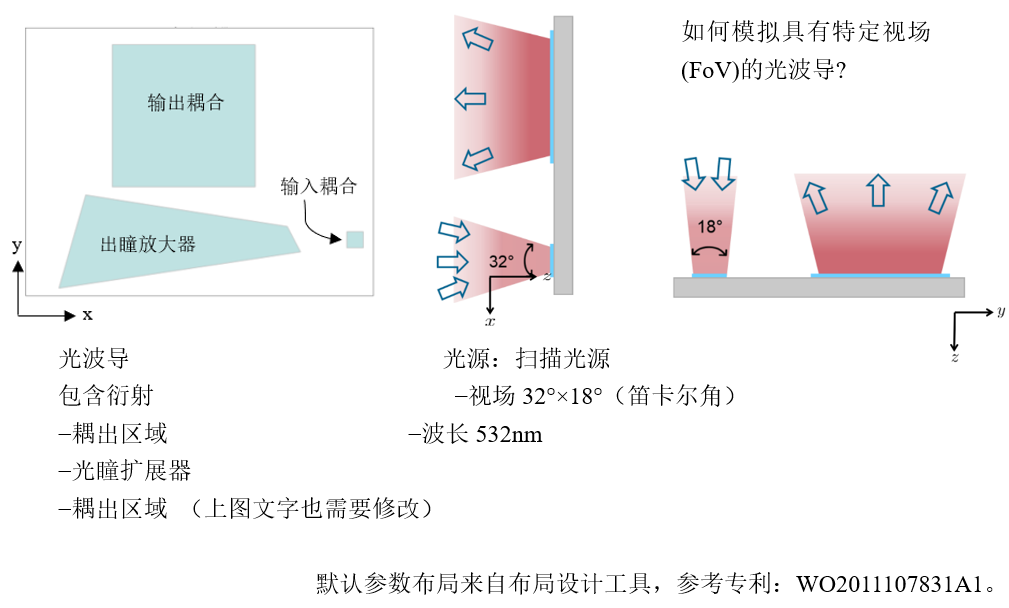
目前,大(dà)多(duō)數(shù)創新的增強和(hé)混合現實設備都是基于光波導配置,并結合微觀結構來(lái)耦合光的輸入和(hé)輸出。VirtualLab Fusion技(jì)術(shù)能夠通(tōng)過應用我們獨特的物理(lǐ)光學方法對這些(xiē)器(qì)件進行(xíng)詳細的建模,其中包括所有(yǒu)感興趣的影(yǐng)響因素(如相幹性、偏振和(hé)衍射)。我們通(tōng)過建立一個(gè)簡單的“HoloLens1”型(1D-1D光瞳擴展器(qì))布局模型來(lái)演示這種能力,該設備能夠在32°×18°的視(shì)場(chǎng)下引導光傳輸。
建模任務
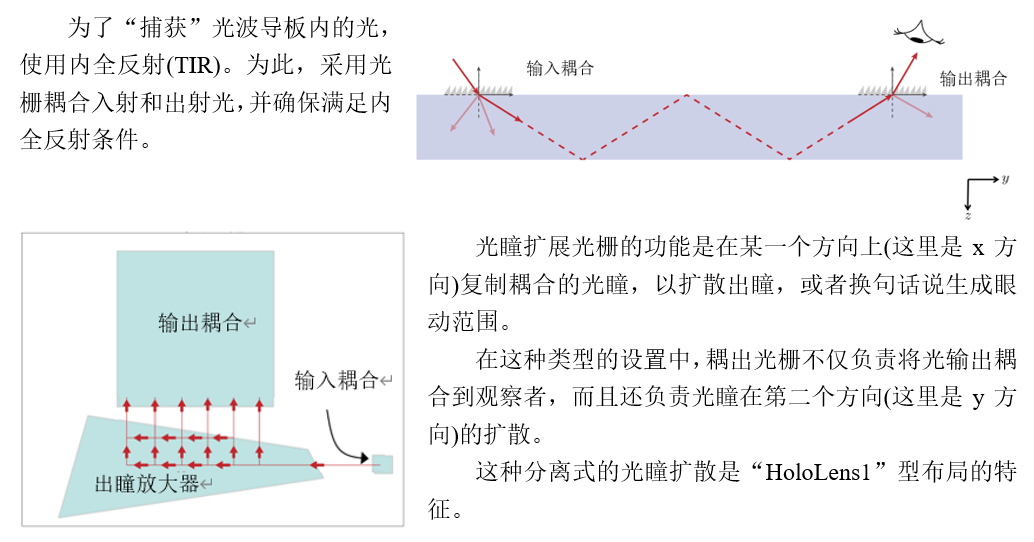
光波導的工作(zuò)原理(lǐ)
布局設計(jì)工具
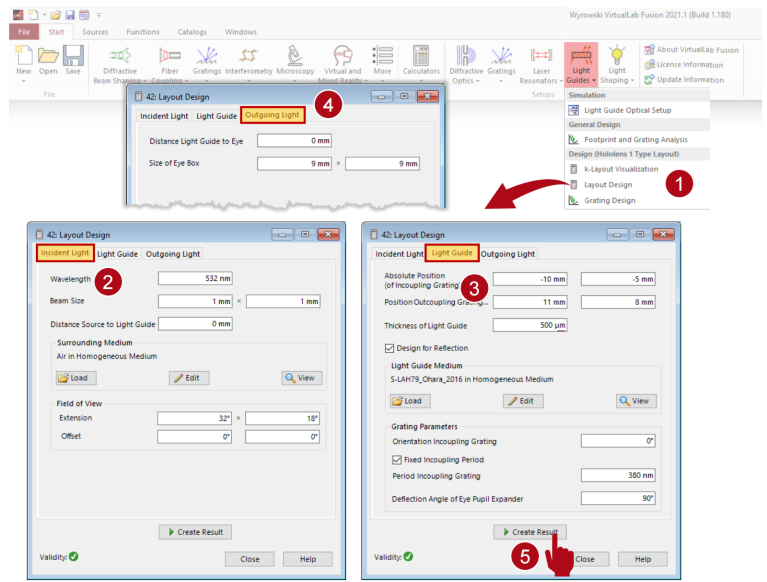
為(wèi)了設置這種光波導的橫向布局,可(kě)以使用VirtualLab的布局設計(jì)工具(僅在光波導工具箱中可(kě)用)。
此使用案例的參數(shù)對應于默認配置。
該工具根據給定的規格的入射光和(hé)眼動範圍提供了一個(gè)光波導的光學參數(shù)設置。特别注意的是,光栅區(qū)域的橫向位置和(hé)延伸以及光栅周期都是自動設置的。
定義參數(shù)後,單擊“創建結果”按鈕,然後會(huì)創建出光學參數(shù)設置和(hé)相應的k域布局圖。
查看k域設計(jì)
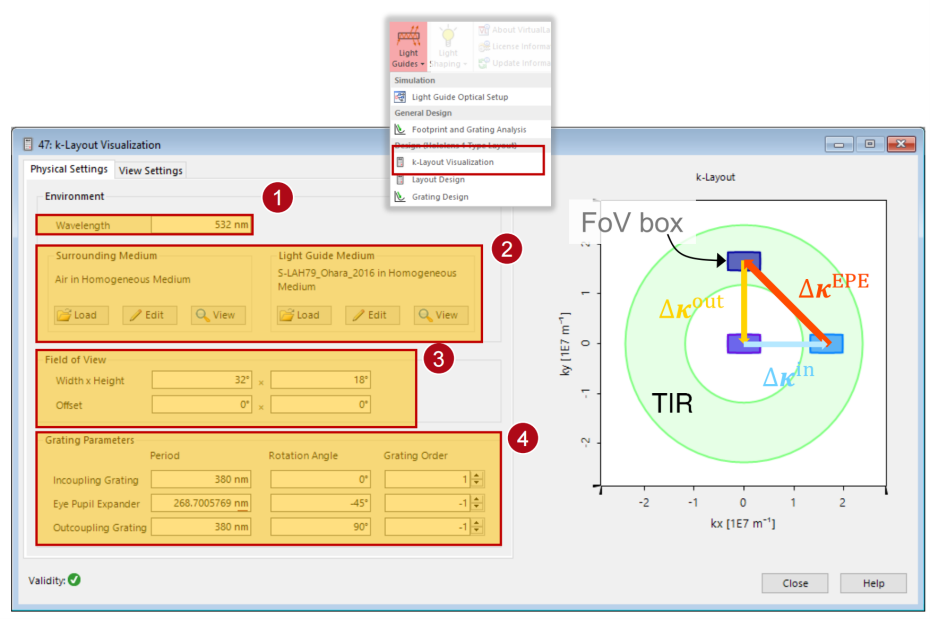
k域設計(jì)圖可(kě)以與光導設置一起作(zuò)為(wèi)布局設計(jì)工具的副産品創建,也可(kě)以通(tōng)過菜單中的條目獨立生(shēng)成。
可(kě)以設置以下參數(shù):
波長;
環境和(hé)平闆的材料;
視(shì)場(chǎng)角範圍;
光栅周期和(hé)方向。
結果圖包含以下信息(在k域中):
描述材料內(nèi)部傳播條件的圓(可(kě)用方向和(hé)k值)。
入射光和(hé)在某些(xiē)光栅區(qū)域後衍射光的延伸、形狀和(hé)位置。
由光栅引入的視(shì)場(chǎng)位移的說明(míng)。
任何參數(shù)的調整都會(huì)相應地改變圖像。
光波導表面設計(jì)
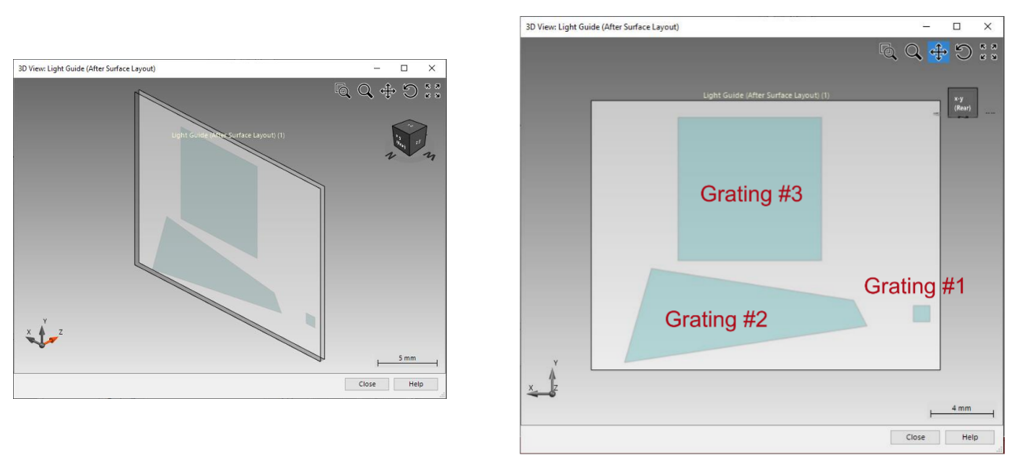
幾何設計(jì)展示了第一平面表面上(shàng)的3個(gè)光栅:
光栅#1:耦入光栅
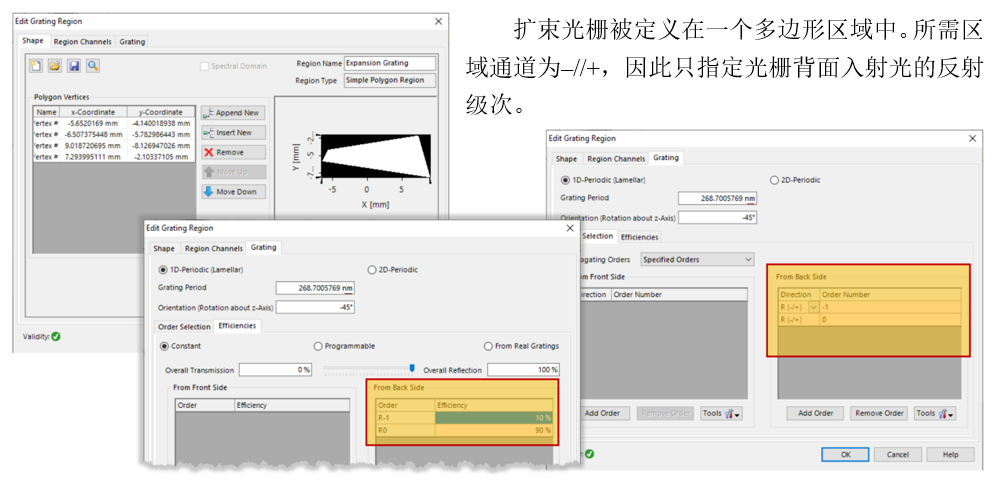
光栅#2:擴束光栅
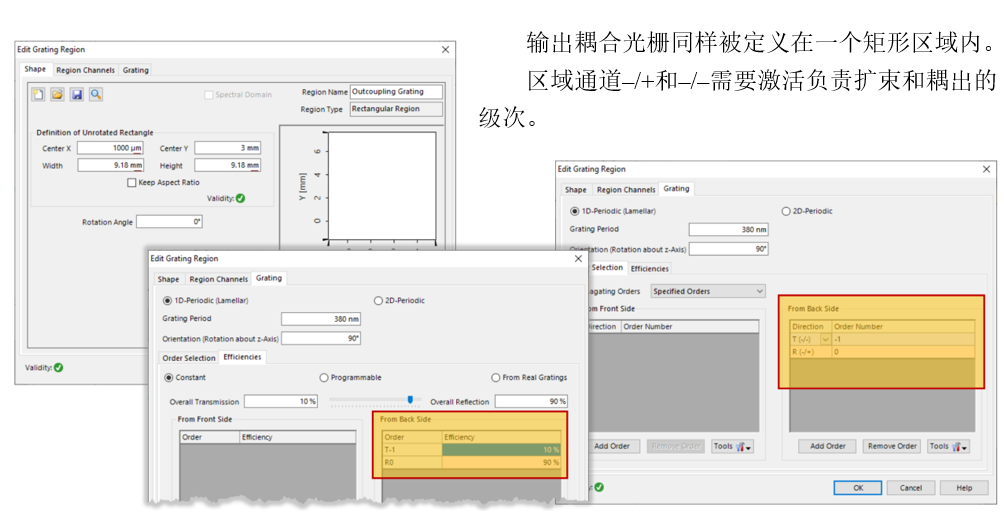
光栅#3:耦出光栅
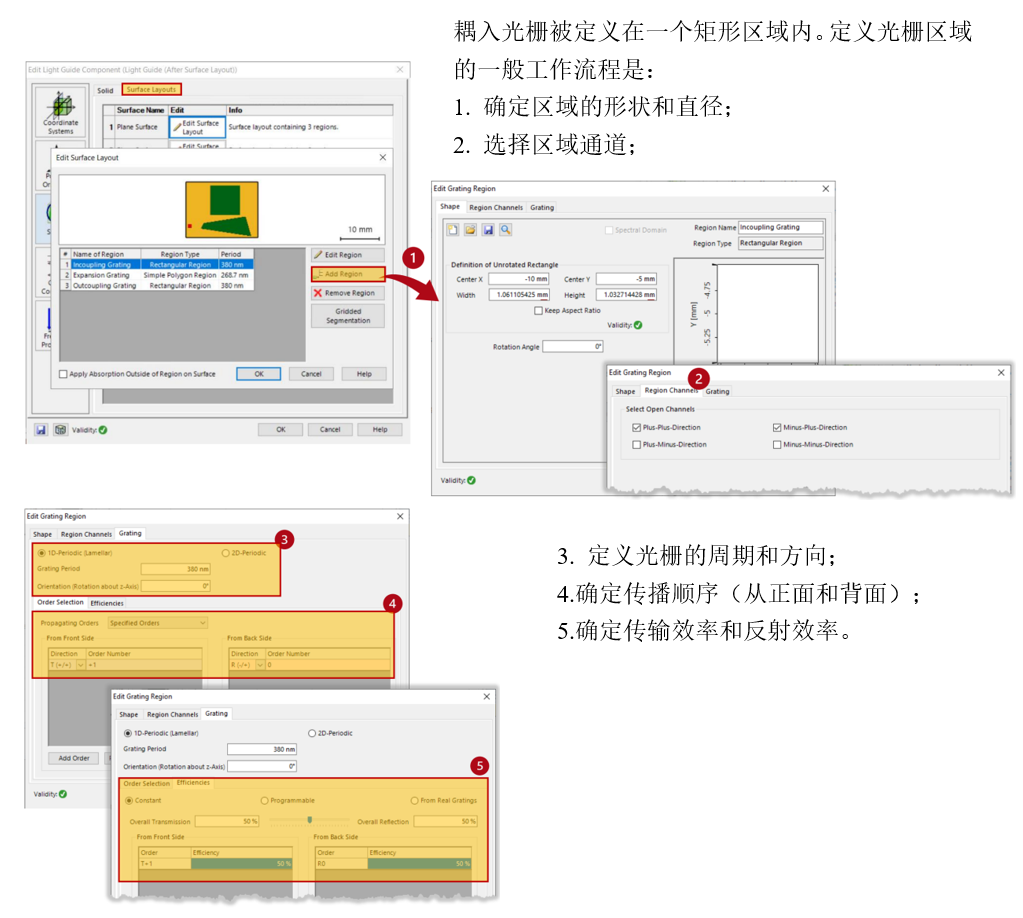
光栅#1:耦入光栅
光栅#2:簡單多(duō)邊形區(qū)域中的擴束光栅
光栅#3:耦出光栅
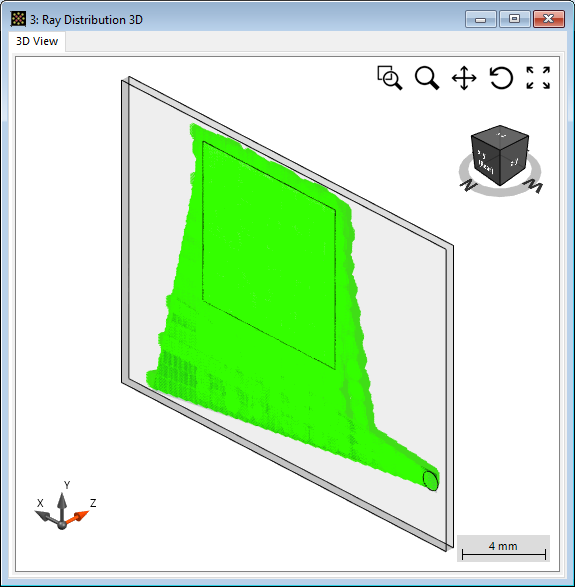
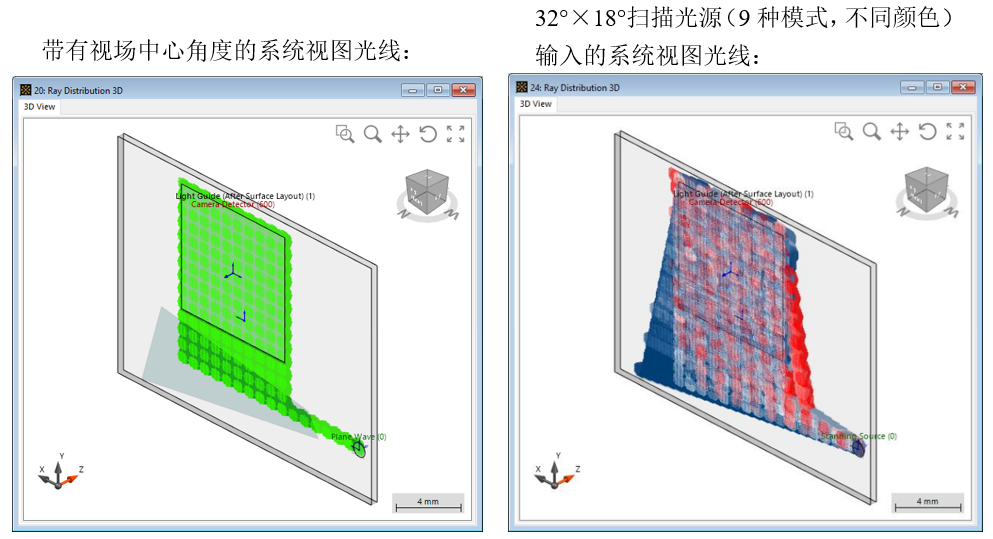
結果:三維系統中的光線追迹
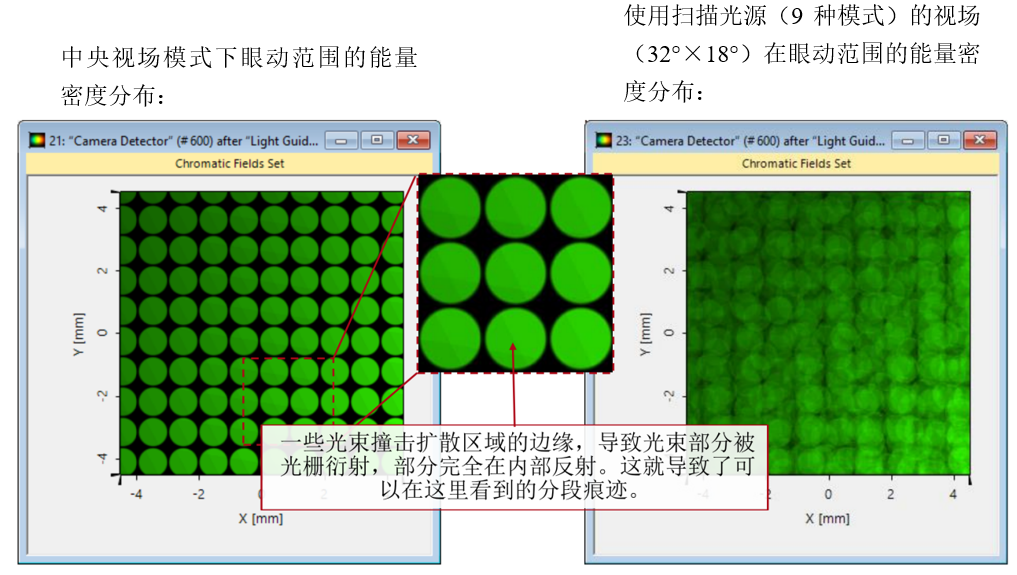
結果:場(chǎng)追迹(全彩色視(shì)圖)
結果:場(chǎng)追迹(僞彩色視(shì)圖)
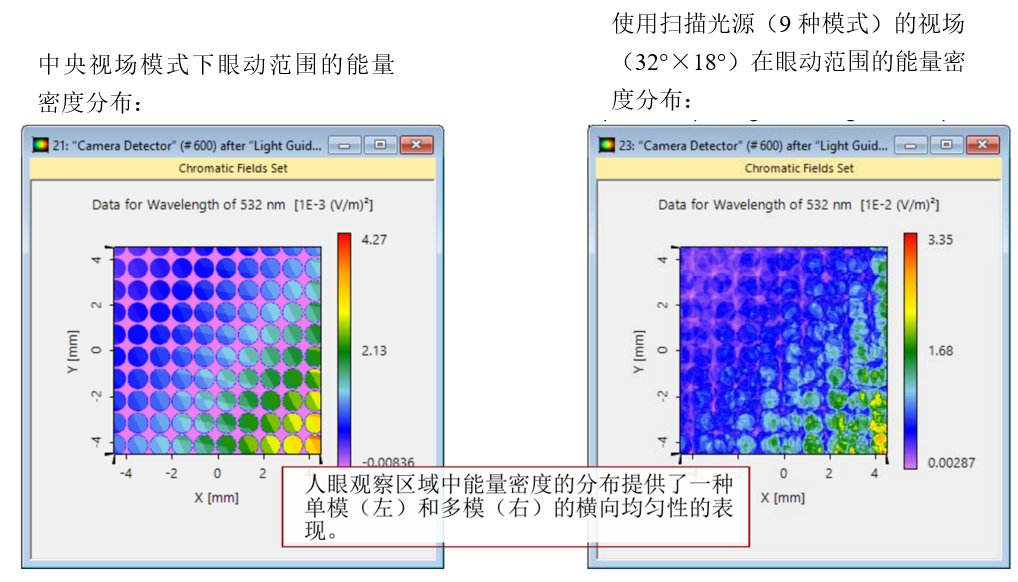
橫向均勻性評價
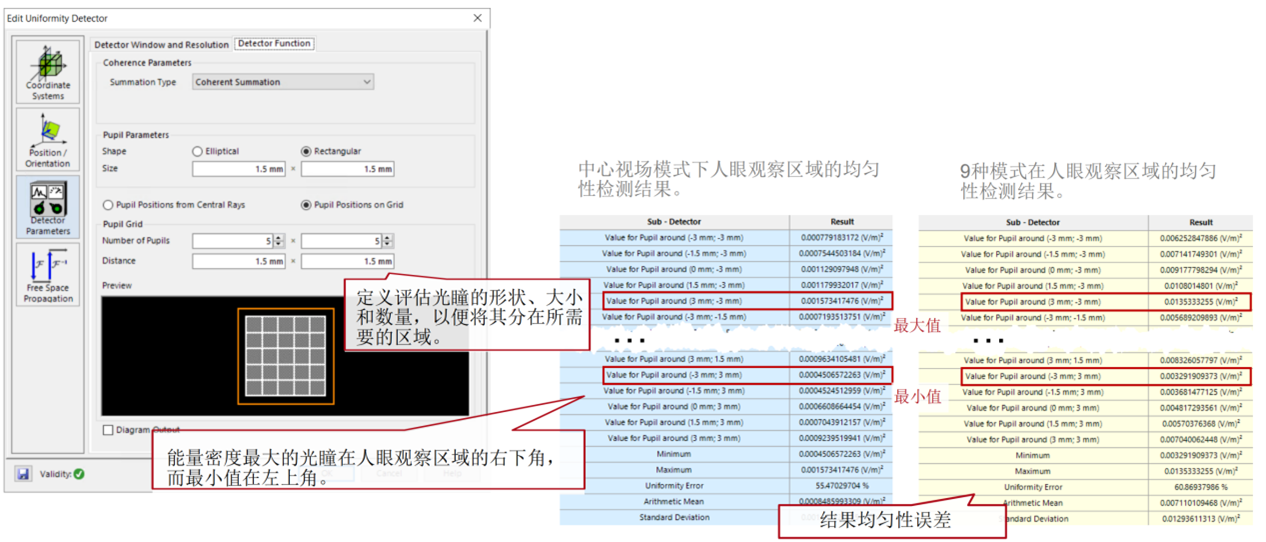
為(wèi)了評估眼動範圍內(nèi)的橫向均勻性,提供了均勻性檢測器(qì),它可(kě)以在元件樹(shù)中找到(在探測器(qì)(Detectors)>優化函數(shù)(Merit Functions)>均勻性檢測器(qì)下(Uniformity Detector)。該探測器(qì)能夠研究在特定位置的特定區(qū)域(如眼動範圍)的橫向能量密度分布。
文檔信息
拓展閱讀
光波導建模
|
光電(diàn)的微信訂閱号!")